


دو چرخ که به یک اکسل ثابت شدهاند (اما در انتهای مخالف اکسل) باید در سرعتهای دیفرانسیل مختلف بچرخند وقتی وسیلهنقلیه دور یک پیچ میچرخد. دلیل آن این است که چرخ واقع در سمت داخلی پیچ باید فاصله کمتری را نسبت به چرخ مقابل طی کند. با این حال، اگر هر دو چرخ به یک میل پلوس متصل باشند، همیشه باید با سرعت یکسان نسبت به یکدیگر بچرخند. وقتی که در اطراف یک پیچ حرکت میکنیم، این موضوع سبب میشود یکی از چرخها سر بخورد تا فاصله ظاهری پوشیده شده را متعادل کند و یا پرش چرخ با تنش مکانیکی زیاد ایجاد شود. برای جلوگیری از این امر، امکان چرخش چرخها در سرعتهای مختلف با استفاده از دیفرانسیل مکانیکی یا هیدرولیکی به وجود آمده است. این امر سبب میشود تا میل پلوس بتواند به طور مستقل دو شفت خروجی، یعنی اکسلهایی که از دیفرانسیل به چرخ میروند، را در سرعتهای مختلف هدایت کند.

بیشتر بخوانید: اکسل خودرو - قسمت سوم
دیفرانسیل این کار را با توزیع نیروی زاویهای (به شکل گشتاور) به طور مساوی ، و توزیع سرعت زاویهای (سرعت چرخش) به طوری که میانگین برای دو شفت خروجی برابر با میانگین دنده رینگی دیفرانسیل باشد، انجام میدهد. در هنگام کار، هر اکسل به یک دیفرانسیل برای توزیع قدرت بین دو طرف چپ و راست نیاز دارد. وقتی توان بین هر چهار چرخ توزیع میشود، یک دیفرانسیل سوم یا "مرکزی" میتواند برای توزیع قدرت بین اکسلهای جلو و عقب استفاده شود.
سیستم توصیفشده به خوبی کنترل میشود، زیرا قابلیت تطابق با نیروهای مختلف حرکتی و توزیع یکنواخت و روان توان را دارد، که لغزش را غیرمحتمل میسازد. با این حال، اگر لغزش اتفاق بیفتد، بازیابی مشکل است. برای مثال، اگر چرخ جلویی سمت چپ یک وسیله نقلیه 4WD در یک قطعه یخ زده از جاده سر بخورد، چرخ لغزان به دلیل اصطکاک کمتر(نیروی عمود بر سطح کمتر) در آن چرخ، سریعتر از چرخهای دیگر میچرخد. از آنجا که یک دیفرانسیل گشتاور برابری برای هر نیم شفت اعمال میکند، توان در چرخهای دیگر کاهش مییابد، حتی اگر اصطکاک بالایی داشته باشند. این مشکل میتواند در وسایلنقلیه 4WD و 2WD نیز زمانی که یک چرخ متحرک بر روی سطحی با اصطکاک کم قرار میگیرد یا از زمین بلند میشود، اتفاق بیفتد. طراحی ساده شده به طور قابل قبولی برای وسایلنقلیه 2WD خوب عمل میکند. این طراحی برای وسایلنقلیه 4WD بسیار کمتر قابلقبول است، زیرا وسایلنقلیه 4WD دارای دو برابر تعداد چرخهایی هستند که اگر آنها اصطکاک و نیروی وارد شده به آنها کم شود احتمال اینکه این اتفاق بیفتد را افزایش میدهند. همچنین احتمال رانندگی وسایلنقلیه 4WD بر روی سطوح با اصطکاک کمتر، بیشتر است. با این حال، از آنجایی که گشتاور بین چهار چرخ به جای دو چرخ تقسیم میشود، هر چرخ تقریبا نصف گشتاور یک وسیله نقلیه 2WD را دریافت میکند که پتانسیل لغزش چرخ را کاهش میدهد.

HMMWV یک 4WD/AWD است که به تمام چرخها به طور مداوم از طریق یک دیفرانسیل مرکزی با قابلیت قفل دستی توان میرساند، دیفرانسیل های تورسن برای جلو و عقب استفاده شده است.
بسیاری از دیفرانسیلها هیچ راهی برای محدود کردن مقدار توان موتور که به شفت خروجی متصل به آن فرستاده میشود، ندارند. در نتیجه، اگر لاستیک در سرعت بالا نیروی ترکشن را از دست بدهد، یا به دلیل اصطکاک کم (به عنوان مثال، رانندگی بر روی شن و ماسه یا یخ) و یا قدرت موتور بر اصطکاک موجود غلبه کند، تایری که نمیلغزد، توان کمی از موتور دریافت میکند و یا هیچ توانی از موتور دریافت نمیکند. در شرایط بسیار کم اصطکاک، این موضوع میتواند مانع حرکت وسیله نقلیه شود. برای غلبه بر این مشکل، بعضی دیفرانسیلها مقدار لغزش را محدود کرده (این موارد دیفرانسیل لغزش محدود نامیده میشوند) یا به طور موقت دو میله خروجی را با هم قفل میکنند تا اطمینان حاصل شود که توان موتور به طور مساوی به تمام چرخهای متحرک میرسد.
دیفرانسیلهای قفلشونده با قفل کردن موقتی شفت خروجی دیفرانسل کار میکنند، که باعث میشود همه چرخها با همان سرعت بچرخند، و در صورت لغزش گشتاور ایجاد کند. این سیستم به طور کلی برای دیفرانسیل مرکزی استفاده میشود، که قدرت را بین اکسلهای جلو و عقب توزیع میکند. در حالی سیستم فرمانی که همه چرخها را به یک اندازه میچرخاند، معمولا برای راننده مشکل ایجاد کرده و مشکلات کنترل را به وجود میآورد، این موضوع در هنگام لغزش چرخها، نگرانی ایجاد نمیکند.
دو مورد از رایجترین نمونههایی که کارخانه دیفرانسیل قفل شونده روی آنها گذاشته، یا از کلاچ چند صفحهای کنترل کامپیوتری یا کوپلینگ ویسکوز برای اتصال به شفت استفاده میکنند، در حالی که دیفرانسیلهای دیگری که بیشتر در وسایل نقلیه آفرود استفاده میشوند به طور کلی از دستگاههای قفل دستی استفاده میکنند. در کلاچ چند صفحهای، کامپیوتر وسیلهنقلیه لغزش را حس میکند و شفتها را قفل میکند، زمانی که این سیستم فعال میشود تکانهای کوچکی ایجاد میکند که میتواند باعث اختلال برای راننده و یا از دست دادن کنترل شود. در دیفرانسیلهای کوپلینگ ویسکوز، تنش برشی ناشی از اختلاف زیاد سرعت شفت، باعث میشود که یک سیال منبسط در دیفرانسیل به جامد تبدیل شود و دو شفت را به هم متصل کند.اشکال این طراحی تخریب سیال با گذشت زمان و قفل شوندگی نمایی است. برخی از طرحها از دندههایی برای ایجاد یک اختلاف سرعت چرخشی کوچک استفاده میکنند که انتقال گشتاور را تسریع میکند.
رویکرد سوم برای محدود کردن لغزش توسط یک دیفرانسیل تورسن انجام میشود، که به شفت خروجی اجازه میدهد تا مقادیر مختلف گشتاور را دریافت کند. این طراحی هنگامی که یک چرخ آزادانه میچرخد و گشتاوری وجود ندارد، ترکشن ایجاد نمیکند، اما در شرایط کمتر بحرانی، کنترل عالیای فراهم میکند. یک دیفرانسیل معمولی Torsen II قبل از اینکه ترکشن در سمت کم ترکشن بیشتر شود، میتواند تا دو برابر گشتاور به سمت ترکشن بالا منتقل کند.
یک نوآوری نسبتا جدید در خودروها سیستم کنترل ترکشن الکترونیکی است. این سیستم معمولا از سیستم ترمز وسایلنقلیه برای کند کردن یک چرخ چرخان استفاده میکند. این کند شدن اجباری مشابه رفتار یک دیفرانسیل لغزش محدود است و همچنین با استفاده بیشتر از ترمزها برای اطمینان از این که چرخها با همان سرعت رانده میشوند، میتواند مانند یک دیفرانسیل قفل شونده عمل کند. این روش به طور معمول نیازمند سنسورهای چرخ برای تشخیص زمانی است که یک چرخ در حال لغزش است و تنها زمانی فعال میشود که لغزش چرخ تشخیص داده شود. بنابراین، معمولا هیچ مکانیزمی برای جلوگیری فعال از لغزش چرخ وجود ندارد (یعنی قفل کردن دیفرانسیل قبل از لغزش چرخ ممکن نیست)؛ در عوض، این سیستم به گونهای طراحی شدهاست که به طور صریح امکان لغزش چرخ را داده و سپس تلاش میکند تا گشتاور را با بهترین ترکشن به چرخ بفرستد. اگر جلوگیری از لغزش تمام چرخها الزامی باشد، این طراحی محدود کننده میشود.
برای جلوگیری از لغزش، برخی از وسایل نقلیه دارای کنترلهایی برای قفل کردن مستقل دیفرانسیل مرکزی، جلویی و عقبی هستند.
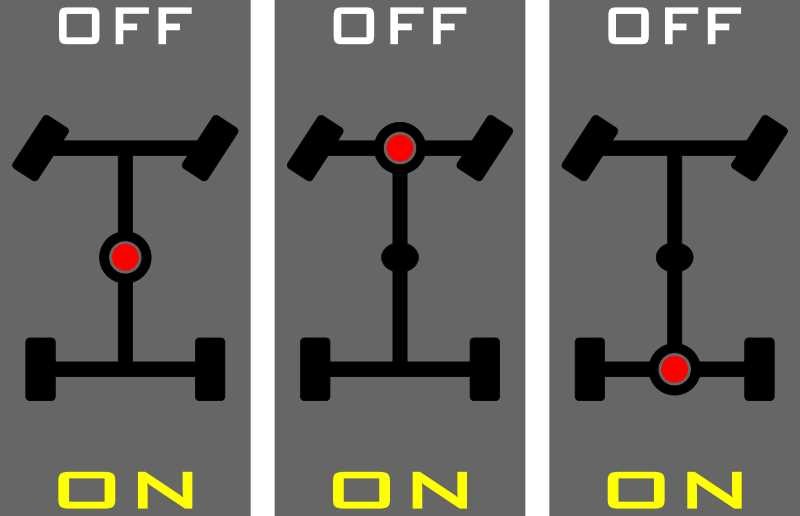
طراحی یک سیستم AWD/4WD را میتوان با نشان دادن حالتهای عملیاتی احتمالی آن توصیف کرد. یک وسیله نقلیه توانایی کار در حالتهای مختلف بسته به انتخاب راننده را دارد. حالتهای مختلف عبارتند از:
علاوه بر این حالتهای پایه، برخی تنظیمات میتواند این حالتها را با هم ترکیب کنند. به عنوان مثال، سیستم میتواند یک کلاچ در سراسر دیفرانسیل مرکزی داشته باشد، که قادر به تنظیم گشتاور اکسل جلو از یک حالت دائمی با نسبت تقسیم گشتاور ۳۰:۷۰ دیفرانسیل مرکزی به نسبت تقسیم گشتاور ۰:۱۰۰ در حالت 2WD است.

دسته انتخاب: 2H برای دو چرخ متحرک، 4Hبرای برد بالا، 4WD برای برد پایین و N برای خلاص
در سال ۱۸۹۳، قبل از تاسیس یک صنعت خودروسازی مدرن در بریتانیا، مهندس انگلیسی "برما جوزف دیپلاک"[3] یک سیستم چهار چرخ متحرک را برای یک موتور بخار ترکشن، شامل چهار چرخ متحرک و سه دیفرانسیل، که متعاقبا ساخته شد، به ثبت رساند. همچنین سیستم چرخ پدریل "برمهاس" که یکی از اولین اتومبیلهای چهار چرخ متحرک بود به نمایش در آمد و توانایی سفر در جادههای چالش برانگیز را نشان دهد. این امر ریشه در ایده قبلی براماگ[4] در مورد توسعه موتوری که میزان خسارت در جادههای عمومی را کاهش میداد، داشت.
برای کسب اطلاعات بیشتر در خصوص خرید لوازم یدکی کیا و لوازم یدکی هیوندای می توانید از طریق وب سایت با مراجعه به صفحه تماس با ما می توانید با کارشناسان ما در ارتباط باشید.
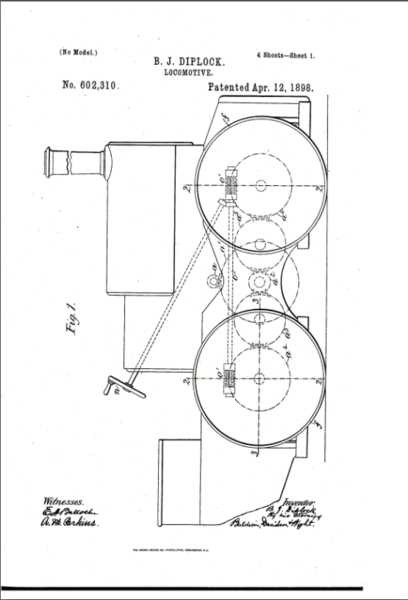
لوکوموتیو بخار دیپلاک[1] سال ۱۸۹۳ اولین وسیله نقلیه زمینی 4WD جهان بود.
فردیناند پورشه[5] یک وسیله نقلیه الکتریکی چهار چرخ متحرک برای Hofwagenfabrik Ludwig Lohner & Co. k. u. k. در وین در سال ۱۸۹۹طراحی کرد و ساخت که در نمایشگاه جهانی ۱۹۰۰ در پاریس به نمایش در آمد. این خودرو یک ماشین سری هیبریدی بود که از یک هاب موتور الکتریکی در هر چرخ استفاده میکرد و با باتری کار میکرد که به نوبه خود توسط یک ژنراتور موتور بنزینی شارژ میشد. این خودرو به طور ناشیانهای سنگین طراحی شده بود و به دلیل وضعیت غیر معمول آن، لوهنر پورشه معروف اعتباری به عنوان اولین اتومبیل چهار چرخ متحرک ندارد.
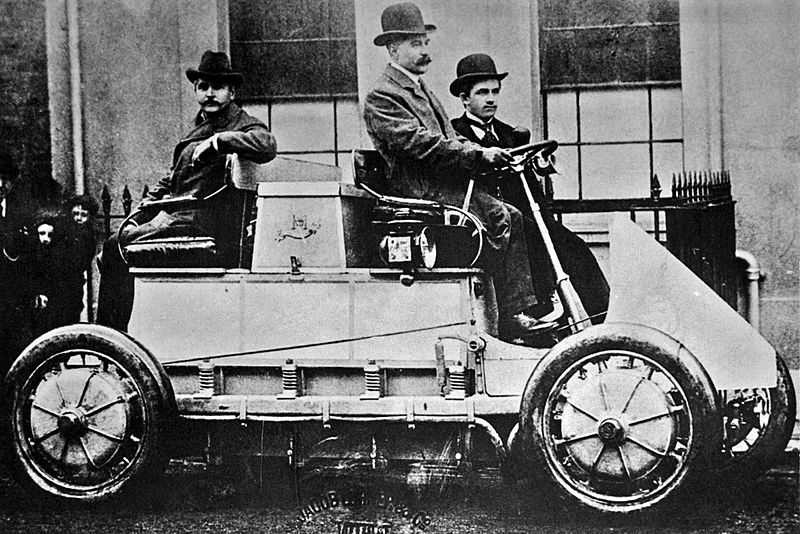
لوهنر - پورشه میکست هیبرید[2] اولین خودروی هیبرید جهان و اولین چهار چرخ متحرک بدون موتور بخار بود.
در سال 1903، Skyper با 60 اسب بخار اولین 4WD جهان بود که به طور مستقیم با یک موتور احتراق داخلی کار میکرد و اولین ماشین مسابقه 4WD جهان بود.
اولین ماشین چهار چرخ متحرک جهان مستقیما با یک موتور احتراق داخلی کار میکرد، و اولین ماشین با یک موتور جلو، طرح چهار چرخ متحرک، Spyker ۶۰ اسب بخار هلندی بود. این ماشین با سفارشی برای مسابقه پاریس به مادرید در سال ۱۹۰۳، توسط برادران جکوبوس[7] و هندریک جان اسپیکر[8] آمستردامی ارائه شد. این خودرو دو سرنشین دارای چهار چرخ متحرک دائمی بود و همچنین اولین خودروی مجهز به موتور شش سیلندر و ترمز چهار چرخ بود. این ماشین که بعدها به عنوان یک مسابقه برای صعود از تپه مورد استفاده قرار گرفت، اکنون در موزه لومن[9] (موزه ملی اتوبییل سابق) در لاهه در هلند به نمایش گذاشته شدهاست.
نشانههای رانندگی چهار چرخ در آمریکا از شرکت توفورد[10] بروکویل پنسیلوانیا در سال ۱۹۰۵ بود. شش نفر در سال ۱۹۰۶ جمع شدهبودند. یکی هنوز وجود دارد و هر ساله نمایش داده میشود. موزه رینولدز - آلبرتا یک وسیله نقلیه چهار چرخ به نام "میشیگان" از سال ۱۹۰۵ در یک انبار تعمیر نشده دارد.
اولین وسایل نقلیه چهار چرخ متحرک برای تولید انبوه، توسط شرکت اتومبیل چهار چرخ متحرک آمریکایی (FWD) در ایالت ویسکانسین، که در سال ۱۹۰۸ تاسیس شد، ساخته شدند (با عبارت "FWD"مخفف چرخ جلو متحرک اشتباه گرفته نشود).
در جنگ جهانی اول، FWD مدل B سه تنی، همراه با مدل ۲ تنی نش کاد، به یک کامیون استاندارد چهار چرخ متحرک نظامی برای ارتش آمریکا تبدیل شد. حدود ۱۶۰۰۰ عدد FWD مدل B از این کامیونها در طول جنگ جهانی اول برای ارتش بریتانیا و آمریکا در حدود نیمی از آنها ساخته شد - حدود نیمی از آنها توسط FWD و بقیه توسط سایر تولیدکنندگان دارای مجوز ساخته شدند. تنها حدود ۲۰% از کامیونهای ساختهشده، چهار چرخ متحرک بودند، اما ۴x۴ها بیشتر در خطوط مقدم قرار داشتند.
حدود ۱۱۵۰۰ کامیون جفریز/نش کاد برای استفاده مشابه بین سالهای ۱۹۱۳ و ۱۹۱۹ ساخته شدند. اتومیبیلهای کاد نه تنها دارای چهار چرخ متحرک و ترمز چهار چرخ بودند، بلکه دارای فرمان چهار چرخ نیز بودند. کاد یکی از اولین خودروهای چهار چرخ متحرک موفقی بود که تا به حال ساخته شدهاست و تولید آن به مدت ۱۵ سال ادامه یافت و در مجموع ۴۱۶۷۴ واحد تا سال ۱۹۲۸ساخته شد.
دایملر-بنز همچنین سابقهای در تولید چهار چرخ متحرک دارد. بعد از اینکه کارخانه دایملر یک وسیله نقلیه چهار چرخ متحرک در سال ۱۹۰۷ به نام درنبرگ-واگن ساخت که مجهز به فرمان چهار چرخ نیز بود، که در سال ۱۹۰۷توسط کارمند دولت استعماری آلمان، برنهارد درنبورگ در نامیبیا مورد استفاده قرار گرفت. مرسدس و بی ام دبلیو در سال ۱۹۲۶ برخی ماشینهای چهار چرخ متحرک نسبتا پیچیده، G1، G4 و G4 followin رامعرفی کردند. مرسدس و بی ام دبلیو این مدل را در سال ۱۹۳۷ توسعه دادند.

جفری/نش کوادز[6] اولین وسایلنقیله 4WD بودند که در ۵ نسخه تولید شدند (۱۹۱۳-۱۹۲۸)
شرکت آمریکایی مارمون - هرینگتون در سال ۱۹۳۱ تاسیس شد تا به بازار رو به رشدی برای وسایل نقلیه چهار چرخ متحرک با قیمت متوسط خدمت کند. مارمون - هرینگتون در تبدیل کامیونهای فورد به ماشینهای چهار چرخ متحرک تخصص دارد و با عقد قرارداد برای کامیونهای سوختگیری هواپیماهای نظامی و تجاری، ۴x۴ شاسی برای بکسل کردن سلاحهای سبک، و سفارش شرکت خط لوله عراقی برای آنچه که بزرگترین کامیونها در آن زمان ساخته شدهبودند، به یک شروع موفق رسید.

ماشین گشت مدل ۹۵ کاروگان ۱۹۴۴-۱۹۳۶ (ژاپن)
ثابت شد که اولین مارمون - هرینگتونها استثنا این قانون بود که اکثر خودروها و کامیونهای 4WD توسعهیافته در دهه ۱۹۳۰ برای دولتها و با در نظر گرفتن کاربردهای جنگی (آینده) ساخته شدهبودند.
داج اولین کامیون چهار چرخ خود را در سال ۱۹۳۴ توسعه داد. یک کامیون نظامی ۱.۵ تنی که 40-X-4 (USA) نام داشت و ۷۹۶ واحد آن در پیکربندیهای مختلف برای ارتش آمریکا ساخته شدهبود. تیمکن[11] اکسلهای جلو و محفظه انتقال را به یک کامیون غیرنظامی را برای مسلح کردن اضافه کرد. محفظه انتقال تیمکن اولین طرح موقت بود، که به راننده اجازه داد تا با استفاده از یک اهرم در داخل اتاقک، چهار چرخ متحرک را درگیر یا خلاص کند. علیرغم بودجههای نظامی محدود دهه ۱۹۳۰ ایالاتمتحده، کامیون ۳۴ به اندازه کافی محبوب بود که یک کامیون مدرنتر ۱.۵ تنی ساخته شود و ۱۷۰۰ کامیون 40-X-4 (USA) در سال ۱۹۳۸ و ۲۹۲ کامیون TF-40-X-4(USA) در سال ۱۹۳۹ تولید شدند.
چهار چرخ متحرک فاتون GAZ-61 (روسیه)
درسال ۱۹۳۶، کارخانه ژاپنی توکیو کوروگانه کوگیو تقریبا ۴۷۰۰ خودرو بی سقف چهارچرخ متحرک به نام ماشین گشت کوروگانه مدل ۹۵ ساخت که در ارتش سلطنتی ژاپن در سال ۱۹۳۷ تا ۱۹۴۴ در طول جنگ دوم چین و ژاپن استفاده میشد. سه نوع بدنه متفاوت ساخته شدند - یک رودستر دو در، یک جیپ دو در، و یک فاتون چهار در، که همگی محفظه انتقال داشتند و چرخهای جلو را با یک موتور OHV V-twin دو سیلندر، ۱.۳ لیتری هوا خنک کن کار میکرد.
در سال ۱۹۳۷ مرسدسبنز G5و بی ام دبلیو ۳۲۵ ۴x۴، دارای فرمان چهار چرخ، چهار چرخ متحرک دائمی، سه دیفرانسیل قفل شونده و تعلیق کاملا مستقل بود. آنها به دلیل تقاضای دولت برای یک وسیله نقلیه مسافربری چهار چرخ تولید شده بودند. مجموعه G/ولف مدرن مانند G500 و G55 AMG هنوز هم در برخی از ویژگیها مشترکند، به استثنای تعلیق کاملا مستقل، زیرا میتواند مانع صافی سطح شود. یونیموگ[12] نیز نتیجه تکنولوژی مرسدس ۴ x۴ است.
نخستین خودروی چهار چرخ متحرک ساخت روسیه، که بخشی از آن نیز برای مصارف غیرنظامی ساخته شدهبود، شرکت GAZ 61 بود که در سال ۱۹۳۸ در اتحاد جماهیر شوروی ساخته شد. "استفاده از غیرنظامیان" ممکن است کمی اشتباه باشد، زیرا بیشتر آنها، اگر نه همه آنها، توسط دولت شوروی و ارتش (به عنوان ماشینهای فرمان) مورد استفاده قرار میگرفتند، اما نسخه GAZ-61-73 اولین وسیله نقلیه چهار چرخ متحرک با بدنه سواری بسته معمولی است. عناصر شاسی در وسایل نقلیه نظامی بعدی مانند GAZ64 سال ۱۹۴۰، و همچنین GAZ-69 سال ۱۹۴۳ و GAZ-69 پس از جنگ و GAZ-M_72 نسبتا غیرنظامی، براساس چرخ عقب متحرک GAZ-20 ویکتوری قرار گرفتند و از سال ۱۹۵۵-۱۹۵۸ ساخته شدند. زندگی غیرنظامی شوروی اجازه گسترش محصولات غیر نظامی مانند جیپ در آمریکای شمالی را نمیداد، اما در دهه ۱۹۶۰، فنآوری خودروهای 4x4 شوروی با مدلهای انگلیسی، آلمانی و آمریکایی برابری میکرد، حتی در برخی جنبهها از آن فراتر میرفت، و برای اهداف نظامی به همان اندازه که به طور فعال توسعه مییافت، تولید میشد و مورد استفاده قرار میگرفت.

ماشین مشابه جیپ GAZ-64 (روسیه)
تا زمانی که برای ارتش در مقیاس بزرگ به وسایلنقلیه "هر جا رو" نیاز نبود، وسائلنقلیه چهار چرخ متحرک و همه چرخ متحرک جای خود را پیدا نکرده بودند. جیپ جنگ جهانی دوم، که در اصل توسط بانتام آمریکایی ساخته شدهبود، اما توسط ویلیز و فورد تولید انبوه شد، در طول جنگ تبدیل به مشهورترین وسیلهنقلیه چهار چرخ در جهان شد. از مجموعه WC داج آمریکایی و انواع شورولت G506 ۴×۴ نیز صدها و هزارها عدد تولید شد، همینطور کامیونهای نظامی پترن کانادایی که 4x4 شایعترین پیکربندی گاردان های متفاوت آنها بود. گفته میشود که آمریکای شمالی حدود ۱.۵ میلیون خودرو ۴×۴ در طول جنگ ساختهاست.
در دسترس بودن اجزای ضروری خاص، مانند محفظه انتقال و به خصوص مفاصل با سرعت ثابت بر توسعه تاثیر میگذارند. اگرچه زیاد در وسایل نقلیه تجاری استفاده نمیشود، اما وسایل نقلیه تمام چرخ متحرک همه به این وسایل نیاز دارند؛ و از دو یا سه برابر میل پلوس استفاده میکردند، یعنی دندههای بیشتری برای قطع کردن همه دیفرانسیلها وجود داشت.
از بهار ۱۹۴۲، فورد، داج و شورولت، که توسط چند شرکت تخصصی با ظرفیت محدود به جنگ کشانده شده بودند، در ساخت این ماشینها به مقدار بیش از ۱۰۰ برابر نسبت به سال ۱۹۳۹ مشارکت کردند.
اگر چه روسیه وسیله نقلیه جیپ مانند خود (GAZ-64) در سال ۱۹۴۰ را داشت، یک سال قبل از جیپ آمریکایی، در سالهای اولیه جنگ، آنها به طور قابل توجهی به وسایلنقلیه لندلیس وابسته بودند، که توسط متحدان غربی فراهم شدهبود. در سال ۱۹۴۳، آنها یک نسخه توسعهیافتهتر را راهاندازی کردند: GAZ-67
در مقابل، اکسیس پاورز[13] ، فولکسواگن کوبلواگن[14] نزدیکترین معادل با جیپ است، که تنها حدود ۵۰۰۰۰ عدد از آن ساخته شدهاست، اگرچه مجهز به هابهای دنده پورتال است، اما فقط چرخ عقب متحرک است.

جیپ آمریکایی ویلیز ۱۹۴۵-۱۹۴۰
ویلیز[16] مدل CJ-2A را در سال ۱۹۴۵ بعنوان اولین خودروی چهار چرخ تولید کامل برای فروش در بازار عمومی معرفی کرد. به دلیل موفقیت جهانی جیپ جنگ جهانی دوم، کاربرد پرقدرت آن، الگویی برای بسیاری از وسایلنقلیه چهار چرخ متحرک ایجاد کرد. داج همچنین تولید کامیونهای غیر نظامی 4WD پاور واگن را برای مدل سال ۱۹۴۶ آغاز کرد. هر دو ویلیز و داج مستقیما از پیشینیان جنگ جهانی دوم خود توسعه یافتند.

یک جیپ ویلیز[15] CJ-2A در سال ۱۹۴۵
لندرور در نمایشگاه موتور آمستردام در سال ۱۹۴۸ به اندازه جیپ صندوقی و همچنین چهار چرخ متحرک فعال ظاهر شد. این محصول که در اصل به عنوان محصول توقف شکاف برای شرکت خودروی روور در نظر گرفته میشد، علیرغم سرمایهگذاریهای اندک، بسیار بهتر از خودروهای مسافربری آنها موفق شد. با الهام از یک ویلیز ام بی[17] – جیپ جنگ جهانی هم جا حاضر- که اغلب در آفرود در مزرعه متعلق به موریس ویلکس، مهندس ارشد از آن استغاده میشد، لندروور در دهه ۱۹۷۰ رنج روور لوکس و در عین حال با قابلیت آفرود و چهار چرخ متحرک را توسعه داد.
ویلیز با به دست آوردن نام "جیپ" در سال ۱۹۵۰، این نام تجاری را به دام انداخته بود. جانشین آن، کایزر جیپ[18]، یک واگن 4WD انقلابی به نام واگنیر[19] را در سال ۱۹۶۳ معرفی کرد. این سیستم نه تنها از نظر فنی ابتکاری بود، بلکه اولین سیستم تعلیق مستقل و اولین سیستم انتقال اتوماتیک متصل به 4WD را داشت بلکه به عنوان یک اتومبیل معمولی مسافربری مجهز و به اتمام رسید. در واقع، جد SUV مدرن بود. رامبلر لوکس[20] یا بویک V8 -پاورد سوپر واگنیر[21] که از ۱۹۶۶ تا ۱۹۶۹ تولید شده بود، بار را حتی بالاتر برد.
جنسن از سیستم تماممتحرک فرمول فرگوسن (FF) برای ۳۱۸ واحد از جنسن[22] FF آنها که از ۱۹۶۶ تا ۱۹۷۱ ساخته شدهبود، استفاده کرد و اولین باری بود از 4WD در تولید خودروی اسپرت GT استفاده شد. در حالی که اکثر سیستمهای 4WD گشتاور را به طور مساوی تقسیم میکنند، جنسن گشتاور را تقریبا ۴۰ % جلو، ۶۰ % عقب با قرار دادن نسبتهای تقسیم مختلف در جلو و عقب تقسیم میکند.

یک واگن برق داج نسل اول
موتورهای آمریکایی (AMC) در سال ۱۹۷۰ بخش جیپ کایزر[23] را خریداری کردند و به سرعت کل خط خودروهای 4WD آفرود را ارتقا و توسعه دادند. گرند واگنیر[24] اضافه کردن توانایی جادهای به رقابت با ماشینهای لوکس سنتی ادامه داد. این موضوع در طول تولید تا سال ۱۹۹۱، حتی پس از خرید کرایسلر از AMC، نسبتا بدون تغییر بود.
سوبارو در سال ۱۹۷۲ لئونه چند منظوره را معرفی کرد، یک واگن ایستگاهی کامپکت و ارزان با یک سیستم چهار چرخ متحرک موقت و سبک که نمیتوانست در پیادهرو خشک حرکت کند. در ماه سپتامبر، AMC، کوادرا تراک[25] را به عنوان مدل سال مدل ۱۹۷۳، جیپ چیروکی و واگنیر[26] معرفی کرد.AWD دائمی، راننده را از بیرون رفتن برای قفل کردن هابها و تنظیم دستی حالتهای 4WD و 2WD خلاص کرد، این امر آنها را در مسابقات رالی FIA بر سایر برندها پیشتاز گرداند. جین هندرسون[27] و کن پوگ [28]در مسابقات قهرمانی رالی پرس آن ریگاردلس[29] FIA با یک جیپ مجهز به کوادرا تراک [30]در سال ۱۹۷۲ برنده شدند.

جنسن FF، اولین 4WD جهان در تولید ماشین اسپرت GT
امریکن موتورز[32] ایگل جدید را برای سال مدل ۱۹۸۰ معرفی کرد. اینها اولین ماشینهای تولید انبوه آمریکایی بودند که از موتور کاملا جلو و سیستم چهار چرخ متحرک استفاده کردند. ایگل AMC به عنوان یک کامیون سواری، کوپه، و واگن ایستگاهی با مدلهای مسافربری تمام چرخ متحرک پیشنهاد شد. ایگلهای جدید تکنولوژی جیپ را با یک پلتفرم اتومبیل مسافری AMC موجود و تایید شده ترکیب کردند. آنها یک دسته محصول کاملا جدید از "تجهیزات اسپرت" یا SUV متقاطع را راه اندازی کردند. ایگلهای AMC از راحتی و نیازهای سطح بالای مدلهای معمولی مسافربری انتظار میرفت آمدند و از تکنولوژی آفرود برای حاشیه ایمنی و فرمانپذیری بیشتر استفاده کردند.
سیال لزج و غلیظ دیفرانسیل مرکزی ایگل، انتقال آرام و روان قدرت را فراهم میکرد که متناسب با محور با بیشترین فرمانپذیری هدایت میشد. این یک سیستم دائمی واقعی بود که تنها در چهار چرخ متحرک بدون پوشش اضافی بر روی قطعات تعلیق یا میل گاردان کار میکرد. هیچ محدوده پایینی در محفظه انتقال مورد استفاده قرار نگرفته است. این طراحی پیشگام طراحیهای دیگر تولیدکنندگان شد. مطبوعات اتومبیل در آن زمان کشش ایگلز[33] را آزمایش کردند و آن را بسیار برتر از سوبارو توصیف و بیان کردند که میتواند بسیاری از وسایلنقلیه به اصطلاح آفرود را شکست دهد. مجله چهارچرخ (Four Wheeler) به این نتیجه رسید که ایگل AMC آغاز نسل جدیدی از ماشینها بود.
ایگل محبوب بود (به ویژه در مناطق برفی)، ظرفیت بکسل کردن داشت و تجهیزات مختلفی از جمله اسپرت و داخل اطاق لوکس داشتند. دو مدل دیگر نیز در سال ۱۹۸۱ اضافه شدند، کامبک[34] و SX/4 ساب کامپکت[35]. یک گیربکس و قطع کنندهی اکسل نیز برای مصرف سوخت اقتصادی بهتر در جلو قرار گرفتند. در طول سالهای ۱۹۸۱ و ۱۹۸۲، یک مبدل منحصر به فرد به این خط اضافه شد. بدنه مونوکوک ایگل[36] برای تبدیل تقویت شد و دارای یک تیرک فولادی با مقطع سقف قابل جابجایی فایبرگلاس بود. واگن ایستگاهی ایگل یک سال پس از اینکه کرایسلر در سال ۱۹۸۷ AMC را خرید در تولید باقی ماند. کل تولید ایگل AMC تقریبا ۲۰۰۰۰۰ وسیله نقلیه بود.

یک واگن ایگل [31] AWD AMC، محبوبترین مدل در این خط در سال ۱۹۸۷
آئودی همچنین در سال ۱۹۸۰ یک ماشین تمام چرخ متحرک به نام آئودی کواترو معرفی کرد. مهندس شاسیهای آئودی، یورگ بنسینگر، در آزمایشهای زمستانی در فنلاند متوجه شده بود که یک وسیلهنقلیه مورد استفاده توسط ارتش آلمان غربی، یعنی فولکسواگن ایتیس[37]، میتواند هر نوع آئودی با کارایی بالا را شکست دهد. او توسعه یک ماشین چهار چرخ متحرک را که برای مسابقه دادن نیز استفاده میشد، برای بهبود تصویر محافظه کارانه آئودی پیشنهاد داد. سیستم کواترو آئودی به یکی از ویژگیها در تولید ماشینها تبدیل شد.
در سال ۱۹۸۷، تویوتا یک ماشین برای رقابت در مسابقات رالی ساخت. تعداد محدودی از وسایل نقلیه خیابانی FIA تاییدشده به نام سلیکا GT - چهار[38] (معروف به تویوتا سلیکا آل - تراک توربو[39] در آمریکای شمالی) تولید شدند. سیستم تمام تراک بعدها در زمینه تولید سریال مدلهای تویوتا کمری، تویوتا کورولا، و تویوتا پریویا در دسترس قرار گرفت.
برخی از اولین ماشینهای چهار چرخ متحرک با موتور میانی، ماشینهای رالی شهری بودند که برای گروه B تاییدشده ساخته شدهبودند، مانند فورد RS200 که از ۱۹۸۴ تا ۱۹۸۶ ساخته شده بود. در سال ۱۹۸۹، سازنده خرد، پنتر وستوینز[40]، یک ماشین چهار چرخ متحرک با موتور میانی به نام پنتر سولو ۲[41]ساخت.

یک AMC ایگل AWD قابل تغییر در سال ۱۹۸۱
در ایالاتمتحده، تا اواخر سال ۲۰۱۳، وسایل نقلیه AWD، ۳۲ %از فروش وسایلنقلیه سبک جدید را تشکیل میدادند، که از سال ۲۰۰۸ تاکنون ۵% افزایش داشتهاست. این امر تا حد زیادی به دلیل محبوبیت نیمهشاسی است. اکثر کراساوور (نیمشاسی)، علیرغم افزایش قیمت خودرو و مصرف سوخت، فنآوری محبوب را ارائه میدهند. سازندگان خودرو مصرفکنندگان را با معرفی AWD به عنوان یک ویژگی ایمنی در تبلیغات آشنا کردند، البته مزیتهای AWD نسبت FWD در شتاب گرفتن نمود مییابد، نه ترمز کردن یا هدایت کردن. آزمایشها نشان دادهاند که اگرچه AWD شتاب بهتری در شرایط زمستانی ارائه میدهد، اما در ترمز کمکی نمیکند.
نیسان در سال ۲۰۰۸، خودروی GTR را معرفی کرد که دارای یک گیربکس عقب بود. سیستم AWD به دو میل پلوس، یک شفت اصلی از موتور به گیربکس و دیفرانسیل و یک میل پلوس دوم از گیربکس به چرخهای جلو نیاز دارد.
[1] Diplock
[2] Lohner-Porsche Mixte Hybrid
[3] Bramah Joseph Diplock
[4] Bramah
[5] Ferdinand Porsche
[6] Jeffery / Nash Quads
[7] Jacobus
[8] Hendrik-Jan Spijker
[9] Louwman
[10] Twyford
[11] Timken
[12] Unimog
[13] Axis powers'
[14] VW Kübelwagen
[15] Willys
[16] Willys
[17] Willys MB
[18] Kaiser Jeep
[19] Wagoneer
[20] luxury Rambler
[21] Buick V8-powered Super Wagoneer
[22] Jensen
[23] Kaiser's Jeep
[24] Grand Wagoneer
[25] Quadra Trac
[26] Cherokee and Wagoneer
[27] Gene Henderson
[28] Ken Pogue
[29] Press-on-Regardless Rally
[30] Quadra Trac
[31] Eagle wagon
[32] American Motors
[33] Eagles
[34] Kammback
[35] subcompact
[36] Eagle's monocoque
[37] Volkswagen Iltis
[38] Celica GT-Four
[39] Toyota Celica All-Trac Turbo
[40] Panther Westwinds
[41] Panther Solo


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








