


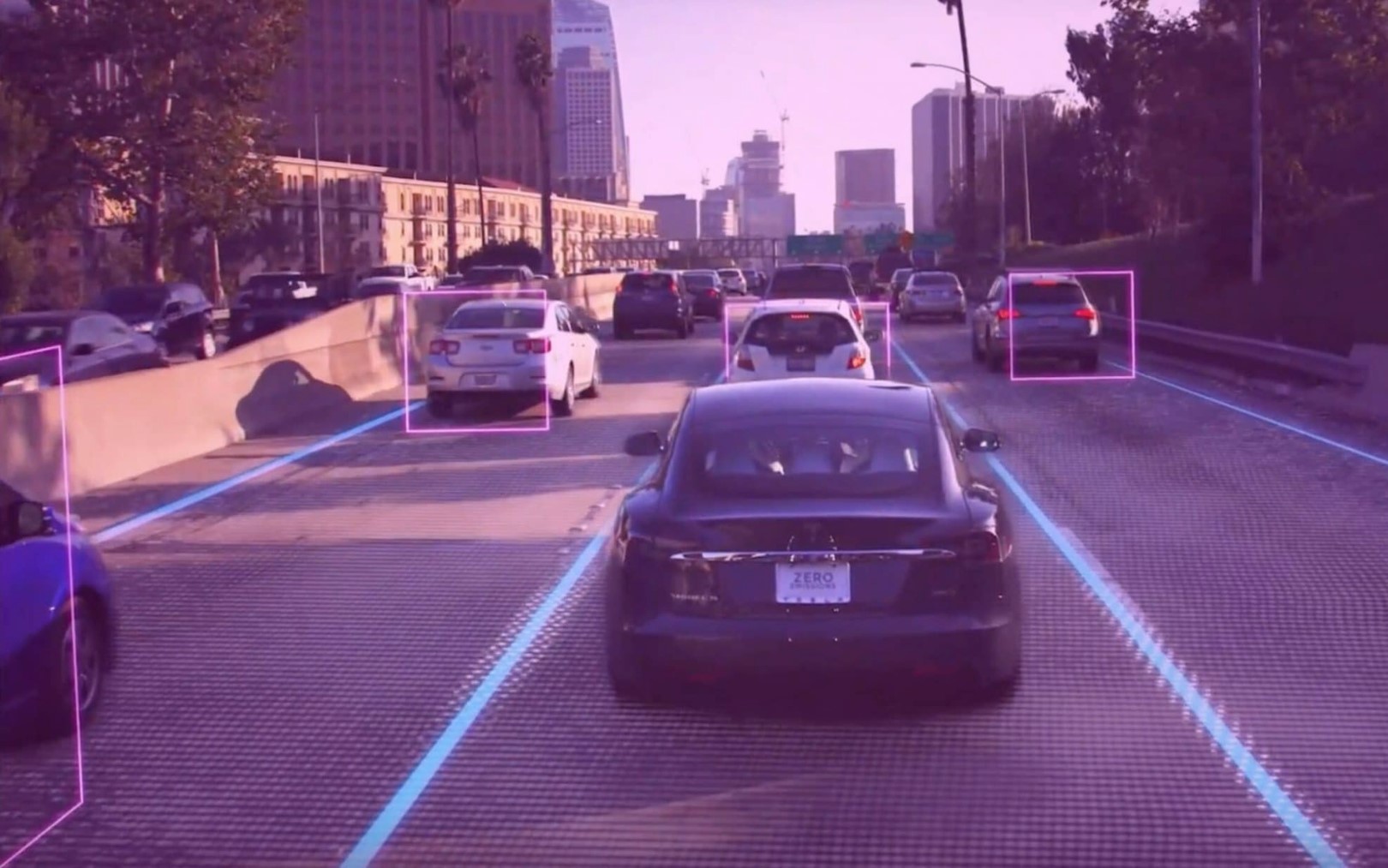
سیستمهای پیشرفته کمکراننده (ADAS)، سیستمهایی الکترونیکی هستند که به رانندگان در هنگام رانندگی و پارک خودرو کمک میکنند. سیستم ADAS از طریق یک واسط بین انسان و ماشین، ایمنی خودرو و جاده را افزایش میدهد. در سیستمهای ADAS از یک فناوری خودکار، مانند سنسور و دوربین برای تشخیص موانع نزدیک یا خطاهای راننده و واکنش بر اساس آنها استفاده میشود.

سیستم کمکراننده تسلا میتواند تصادفات را کاهش دهد، زیرا باعث میشود تا بیتوجهی و خستگی حاصل از یک رانندگی طولانیمدت از بین برود.
بیشتر تصادفات جادهای به خاطر خطاهای انسانی رخ میدهند. سیستمهای پیشرفته کمکراننده با هدف خودکارسازی، تطبیق و بهبود سیستمهای خودرو برای ایمنی و رانندگی بهتر طراحی و توسعه یافتهاند. اثبات شده است که سیستمهای خودکار ADAS میتوانند با کاهش خطاهای انسانی، سهم بسزایی در کاهش تلفات جادهای داشته باشند. در این سیستمها از فناوریهای مختلف بهره گرفته شده و یک سری امکانات تعبیه شده است که از بروز تصادفات و برخوردها جلوگیری به عمل میآورند. این سیستمها مشکلات موجود را به راننده هشدار داده، محافظتهای مورد نیاز را به عمل آورده و در صورت لزوم، کنترل خودرو را در دست میگیرند. همچنین امکانات سازگارشوندهای نیز ممکن است در این سیستمها تعبیه شده باشند تا نور خودرو را به صورت خودکار تنظیم کنند، کروز کنترل را به کار اندازند، در پیشگیری از برخوردها کمک کرده، خط مرکز جاده را بیابند، از طریق گوشیهای هوشمند در راهبری خودرو کمک کنند و بسیاری از امکانات دیگر را نیز در اختیار راننده قرار دهند.
سیستمهای پیشرفته کمکراننده، اولین بار در حدود 50 سال پیش با پذیرش ترمزهای ضدقفل مورد استفاده قرار گرفتند. سیستمهای ADAS اولیه دارای کنترل پایداری الکترونیکی، ترمزهای ضدقفل، سیستمهای اطلاعات نقطه کورخودرو، هشدار برای انحراف از خط، سیستم کروز کنترل سازگارشونده و کنترل کشش بودند. این سیستمها ممکن است از مخدوششدن تنظیمات بالانس مکانیکی یا صدمات ناشی از یک برخورد، متأثر شده و کارآیی خود را از دست بدهند. این مسأله باعث شده است تا بسیاری از سازندگان، الزام نمایند که پس از هر بار بالانس، این سیستم را به صورت خودکار ریست کنید.
تکیه بر اطلاعات محیط بیرونِ خودرو در مقایسه با اطلاعات داخل خودرو، همان چیزی است که سیستمهای پیشرفته کمکراننده (ADAS) را از سیستمها کمکراننده (DAS) متمایز میسازد. ADAS مبتنی بر منابع مختلف دادهای، از جمله تصویربرداری از خودرو، LiDAR، رادار، پردازش تصویر، بینایی کامپیوتر و شبکهسازی در درون خودرو است. همچنین ممکن است دادههای دیگری هم از منابعی دیگر، جدای از پلتفرم اولیه خودرو به دست آید که از آن جمله میتوان به خودروهای دیگر (ارتباطات خودرو به خودر یا V2V) و زیرساختها (ارتباطات خودرو با زیرساخت یا V2I) اشاره نمود. در خودروهای مدرن، سیستمهای پیشرفته کمکراننده به صورت یکپارچه در سیستم الکترونیکی خودرو تعبیه شده است؛ سازندگان نیز میتوانند این امکانات جدید را اضافه کنند.
سیستمهای ADAS به عنوان سیستمهای لحظهای به شمار میآیند، زیرا میتوانند به سرعت به ورودیهای مختلف واکنش نشان داده و اطلاعات ورودی را اولویتبندی کنند تا از بروز تصادفات جلوگیری به عمل آید. در این سیستمها از برنامهریزی اولویت به صورت پیشدستانه برای سازماندهای و مشخصکردن کارهایی که باید زودتر انجام شوند، استفاده میشود. تخصیص نادرست این اولویتها، همان چیزی است که نه تنها فایدهای ندارد، بلکه منجر به صدمات و خسارتهایی نیز میشود.
سیستمهای پیشرفته کمکراننده را بر اساس میزان اتوماسیون آنها و مقیاسی که توسط جامعه مهندسین خودرو (SAE) مشخص شده است، به سطوح مختلفی تقسیمبندی مینمایند. سیستمهای ADAS را میتوان به پنج سطح تقسیمبندی نمود. در سطح صفر، سیستم ADAS نمیتواند کنترل خودرو را در دست گیرد و صرفاً اطلاعاتی را برای راننده تأمین میکند تا راننده، خود آنها را تفسیر کند. برخی از سیستمهای ADAS که میتوان آنها را در سطح صفر فرض نمود، عبارتند از: سنسورهای مخصوص پارک، دید پیرامونی، شناسایی علامتهای ترافیکی، هشدار برای خروج از خط، دید در شب، سیستمهای اطلاعات در مورد نقاط کور، هشدار ترافیک از عقب و هشدار در مورد تصادفاتی که جلوتر رخ داده است. سطوح 1 و 2 نیز از آن جهت شبیه به یکدیگر هستند که در هر دو سطح، راننده است که تصمیم میگیرد. تفاوت در آن است که در سطح 1، کنترل بر روی کارکردها وجود دارد، اما در سطح 2، کنترل بر روی کارهای مختلف وجود دارد تا سیستم بتواند به راننده کمک کند. سیستمهای ADAS که میتوان آنها را در سطح 2 قرار داد، عبارتند از: کروز کنترل سازگارشونده، ترمز کمکی اضطراری، ترمز کمکی اضطراری خودکار، حفظ حرکت در خط و مرکزیابی خط. سیستمهای ADAS که در سطح 2 قرار میگیرند، عبارتند از: کمک در بزرگراه، پیشگیری خودکار از برخورد با موانع و پارک مستقل. از سطح 3 تا سطح 5، مقدار کنترل خودرو توسط سیستم افزایش مییابد؛ سطح 5 وقتی است که خودرو به صورت کاملاً خودکار و مستقل حرکت میکند. برخی از این سیستمها، هنوز به صورت کامل در خودروهای تجاری نهادینه نشدهاند. به عنوان مثال، راننده بزرگراه، یک سیستم در سطح 3 است و سیستم پارک خودکار به عنوان یک سیستم سطح 4 به حساب میآید. اما از این دو سیستم هنوز هم در سطح خودروهای تجاری به طور کامل استفاده نمیشود.
چشممتحرک (Mobileye) که یکی از شرکتهای اینتل است، یک مجموعه جامع از سیستمهای ADAS توسعه داده است که در بین سیستمهای فعال و واکنشی قرار میگیرد. در سیستمهای واکنشی ADAS هشدارهایی در خصوص موقعیتهای خطرناک ممکن به راننده داده میشود تا زمان کافی برای واکنش داشته باشند. مثالهایی از سیستمهای ADAS واکنشی عبارتند از هشدار برای جداشدن از خط و هشدار در خصوص تصادفهایی که در جلو رخ داده است. در هر دو مورد به راننده هشدار داده میشود تا از تصادف و برخورد جلوگیری شود. این در حالی است که در سیستمهای ADAS فعال، پس از آنکه هشدارهایی در خصوص موقعیتهای خطرناک به راننده داده میشود، اقداماتی هم در رابطه با آنچه مشاهده شده است، صورت میگیرد. مثالهایی از سیستمهای ADAS فعال عبارتند از کروز کنترل سازگارشونده و کمک برای حرکت خودرو در خط (LKA) که هر دو بدون دخالت راننده، اقدام مینمایند.
سیستمهای پیشرفته کمکراننده، جزء بخشهایی هستند که در الکترونیک خودرو به سرعت در حال پیشرفت هستند و دلیل این امر هم آن است که همواره استانداردهای کیفیت و ایمنی بیشتری در این صنعت مورد پذیرش واقع میشوند.

این فهرست، فهرستی کامل برای سیستمهای پیشرفته کمکراننده نیست، بلکه اطلاعاتی را در خصوص مثالهای مهم از ADAS ارائه مینماید که پیشرفت کردهاند و از سال 2015 به بعد، بیشتر مورد استفاده قرار گرفتهاند.

بر اساس نظر PACTS، عدم استانداردسازی کامل میتواند باعث شود تا رانندگان نتوانند سیستمها را به خوبی درک کنند و تصور کنند که این خودرو نیز شبیه به خودروهای دیگر است، در حالی که این موضوع درست نیست.
سیستمهای پیشرفته کمکراننده (ADAS) محدودیتهای زیادی هم دارند. به عنوان مثال، سیستمهای پیش از برخورد یک راهنمای 12 صفحهای دارند. در این راهنما، 23 مورد استثنا وجود دارد که موارد عدم استفاده از سیستم را تشریح میکند. همچنین به 30 مورد مختلف اشاره شده است که این سیستم، نمیتواند در صورت برخوردهای احتمالی کارآیی داشته باشد.
اسامی مربوط به امکانات سیستم ADAS نیز استانداردشده نیستند. به عنوان مثال، سیستم کروز کنترل سازگارشونده را در نظر بگیرید، شرکتهای فیات، جنرال موتورز، VM، ولوو و پژو، این سیستم را کروز کنترل سازگارشونده مینامند، اما شرکت نیسان آن را کروز کنترل هوشمند، شرکتهای سیتروئن و BMW آن را کروز کنترل فعال و مرسدس بنز هم آن را DISTRONIC مینامد. SAE International به منظور استانداردسازی، مجموعهای از توصیهها را برای نامگذاری سیستمهای ADAS برای خودروسازان ارائه کرده است. این توصیهها بر اساس گزارشات مصرفکنندگان، انجمن خودروسازی آمریکا، J.D.. Power و شورای ملّی ایمنی تهیه شده است.
به علت عدم وجود استانداردهای مشخص، دکمهها و نمادهای روی داشبورد برای این سیستمها نیز در خودروهای مختلف با هم فرق دارند.
رفتار و عملکرد سیستم ADAS نیز در خودروهای مختلف با هم متفاوت است. به عنوان مثال، سرعت کروز کنترل ACC ممکن است در بیشتر خودروها به صورت موقت قطع شده و خودرو با سرعت بیشتری حرکت کند، اما بعضی از سوئیچها پس از یک دقیقه در حالت انتظار (StandBy) باقی میمانند.
صنعت AV به سرعت در حال رشد و توسعه است و بر اساس گزارشی که از سوی «آینده تحقیقات بازار» ارائه شده است، انتظار میرود که تا سال 2027 به عددی بیش از 65 میلیارد دلار دست پیدا نماید. انتظار میرود که بیمه در صنعت AV و افزایش رقابت هم به این رشد دامن زند. بیمه خودروها برای سسیتمهای کمکراننده به صورت مستقیم بر روی اقتصاد جهان تأثیر گذاشته و بسیاری از سوالات را در ذهن عموم مردم ایجاد کرده است. سیستمهای ADAS باعث شدهاند تا امکانات خودراننده در خودروهای خودران (AV) فراهم شوند، اما در کنار این موضوع ریسکهایی هم برای سیستمهای ADAS وجود دارد. به شرکتها و سازندگان خودروهای خودران (AV) توصیه میشود که خودروهای خود را در زمینههای زیر بیمه کنند تا از دعاوی حقوقی جدی در این زمینه در امان باقی بمانند. بسته به یک سطح مشخص که از صفر تا 5 عددگذاری میشود، سازنده خودرو بهترین منافع خود را ترکیبی از بیمههای مختلف پیدا کرده و برای محصولات خود، از آن استفاده میکند. توجه داشته باشید که این فهرست، جامع و کامل نیست و همواره بر اساس انواع بیمهها و ریسکهایی که در هر سال پیش میآیند، به روز میشوند.
با فناوریهایی که در این خودروهای خودران تعبیه شده است، در صورتی که تصادفی برای خودرو پیش آید، این سیستمها میتوانند دادههای مربوط به حادثه را گزارش کنند. این کار میتواند به اداره دعاوی و عملکرد آن جان بخشد. این سیستمها همچنین تمامی دقایق رانندگی در طول مسیر را ثبت میکنند و بدین ترتیب، امکان کلاهبرداری در تصادفات وجود نخواهد داشت. همچنین انتظار میرود که سیستمهای ADAS با مبارزه با رفتارهای کلاهبرداری انسانها بتوانند صنعت بیمه را رونق بخشند و منجر به توسعه و کارآمدی اقتصاد شوند. در ماه سپتامبر سال 2016، NHTSA سند فدرال برای خطمشی خودروهای خودران را منتشر نمود. در این سند، خطمشیهای وزارت راه ایالات متحده در رابطه با خودروهای بسیار خودکار (HAV) ارائه شد. در این سند، تمامی خودروها از جمله خودروهای دارای سیستمهای پیشرفته کمکراننده تا خودروهای خودران پوشش داده شده است.

در ماه مارس سال 2014، اداره ملی ترافیک بزرگراهی (NHTSA) در وزارت حمل و نقل ایالات متحده اعلام نمود که تمامی خودروها باید وزنی کمتر از 10000 پوند (4500 کیلوگرم) داشته باشند و باید تا ماه می سال 2018، به دوربینهای عقب مجهز شوند. این قانون از سوی کنگره به عنوان بخشی از قانون ایمنی حمل و نقل کودکان کامرون گولبرانسن ، به صورت الزام اعلام شد. این قانون نیز بر اساس کامرون گولبرانسنِ 2 ساله نامگذاری شده بود. پدر کامرون نتوانسته بود تا فرزند کوچک خود را در مسیر بیبیند و با خودروی شاسیبلند خود به او زده بود.
پیشرفتهایی که در حوزه رانندگی خودران توسط خودروها صورت گرفته است، منجر به ایجاد دغدغههایی در زمینه اخلاقی هم شده است. اولین دغدغههای مربوط به رانندگی خودکار را میتوان در اوایل عصر ترامواها دید. مسأله تراموا یکی از شناختهشدهترین مسائل اخلاقی در این حوزه است. مسأله تراموا در سال 1967 توسط فیلسوف انگلیسی به نام فیلیپا فوت مطرح شده است. بر اساس این مسأله، سؤال شده است که اگر ترمز تراموا از کار بیفتد و پنج نفر نیز در جلوی تراموا حضور داشته باشند، آیا راننده تراموا باید به حرکت مستقیم خود ادامه دهد و آن پنج نفر را بکشد یا اینکه باید به سمت پیادهرو برود و یکی از عابران پیاده را از پای درآورد؟ راننده چه باید بکند؟ پیش از ابداع خودروهای خودران، مسأله تراموا به عنوان یکی از چالشهای اساسی در میان سودمندگرایان و اخلاقباوران مطرح بود. در هر صورت، با پیدایش و پیشرفت سیستمهای ADAS، مسأله تراموا به مسألهای تبدیل شد که باید در برنامهنویسی برای خودروهای خودران پیاده میشد. تصادفاتی که خودروهای خودران با آنها روبرو میشوند، بسیار شبیه به همان مسألهای است که در تراموا مطرح شده است. هر چند سیستمهای ADAS کمک میکنند تا خودروها نسبت به خودروهای دارای راننده امنتر شوند، اما در هر صورت نمیتوان به طور کامل از تصادف اجتناب نمود. بنابراین، سؤالات مختلفی مطرح میشود. مثلاً اینکه «در صورت بروز یک تصادفِ ناگزیر، جان کدامیک از افراد از اولویت بیشتری برخوردار است؟» یا اینکه «اصل جامع برای طراحی الگوریتمهای تصادفات چه باید باشد؟»
بسیاری از محققین، روشهای مختلفی را بررسی کردهاند تا ببینند که چگونه باید دغدغههای اخلاقی مربوط به سیستمهای ADAS را حل و فصل کنند. به عنوان مثال، با استفاده از روشهای هوش مصنوعی میتوان بستری را برای کامپیوترها فراهم نمود تا بتوانند مسائل اخلاقی انسانی را یاد بگیرند. برای این کار باید دادههای مربوط به اقدامات انسانها را به سیستم وارد کرد. یک چنین روشی، زمانی میتواند مفید واقع شود که نتوان قوانین را تبیین نمود، زیرا کامپیوترها توانایی آن را دارند که عناصر اخلاقی را یاد گرفته و شناسایی نمایند و دیگر نیازی نیست تا به صورت دقیق برنامهنویسی شوند و مشخص کنند که آیا یک اقدام، اخلاقی هست یا خیر. در هر صورت، محدودیتهایی هم در این روش وجود دارد. به عنوان مثال، انسان بسیاری از کارها را به صورت غریزی برای حفاظت از خود انجام میدهد. این رفتارها واقعی هستند، اما الزاماً اخلاقی به حساب نمیآیند. ورود اینگونه دادهها به داخل کامپیوترها نمیتواند تضمین کند که کامپیوتر، الزاماً رفتار ایدهآل را از خود بروز خواهد داد. علاوه بر این، دادههایی که به الگوریتمهای هوش مصنوعی وارد میشوند، باید با احتیاط و با دقت انتخاب شوند تا از تولید خروجیهای نامطلوب جلوگیری شود.
یکی دیگر از روشهای قابل ذکر در این زمینه، یک روش سه مرحلهای است که توسط نواه گودال ارائه شده است. در این روش، ابتدا لازم است که سیستم با توافق با خودروساز، مهندس حمل و نقل، وکیل و اخلاقشناس ساخته شده باشد و باید به صورت شفاف تنظیم شده باشد. در مرحله دوم، هوش مصنوعی، رفتار اخلاقی انسان را یاد میگیرد و در عین حال، در چارچوب تعیینشده در مرحله یک عمل میکند. در نهایت هم این سیستم باید بازخوردهایی را برگرداند که توسط انسان قابل فهم باشد.

سیستمهای حمل و نقل هوشمند (ITS) بسیار شبیه به سیستمهای پیشرفته کمکراننده هستند، اما کارشناسان بر این عقیده هستند که سیستمهای ITS فراتر از سیستمهای ترافیک خودکار عمل میکنند تا سازمانهایی که حمل و نقل افراد را به صورت هوشمند انجام میدهند، نیز پوشش داده شود. در ITS، فناوری حمل و نقل با زیرساختهای شهری یکپارچه شده است. در نتیجه، یک «شهر هوشمند» به وجود میآید. این سیستمها اثربخشی جادهها را با اضافهنمودن 22.5 درصد ظرفیت به صورت میانگین و به صورت یک شمارش واقعی بالا میبرند و بدین ترتیب، ایمنی فعال در جادهها افزایش مییابد. بر اساس یکی از تحقیقاتی که در سال 2008 انجام شده است، سیستمهای پیشرفته کمکراننده توانستهاند به افزایش ایمنی فعال در جادهها کمک کنند. در سیستمهای ITS از یک سیستم گسترده بر اساس فناوری ارتباطات استفاده شده است که شامل فناوریهای بیسیم و فناوریهای سنتی است و در کنار یکدیگر، بهرهوری را افزایش میدهند.
چنانچه قصد تهیه قطعات لوازم یدکی هیوندای و یا لوازم یدکی کیا را دارید میتوانید با کارشناسان ما تماس بگیرید و یا در غیر این صورت میتوانید به صورت حضوری به آدرس درج شده در سایت مراجعه کنید.


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








