


سیستمهای تعلیق میتواند به دو زیرگروه تقسیم شود: مستقل و غیرمستقل. این عبارات بر توانایی چرخهای مقابل به حرکت مستقل از یکدیگر دلالت دارد. یک سیستم تعلیق غیرمستقل معمولا یک تیر (اکسل ساده مدل گاری) یا یک اکسل متحرک دارد که چرخها را نسبت به یکدیگر موازی و نسبت به اکسل عمود نگه میدارد. هنگامی که زاویه یک چرخ تغییر میکند، زاویه چرخ دیگر نیز به همین میزان تغییر میکند (به طور معمول این تغییر زاویه در یک سمت مثبت و در سمت دیگر منفی خواهد بود). سیستمهای تعلیق De Dion نیز در همین گروه جای میگیرند، زیرا در این نوع نیز چرخها به یکدیگر متصل هستند.
بیشتر بخوانید: سیستم تعلیق خودرو - قسمت سوم
در سیستم مستقل، چرخها بدون تاثیر در چرخ مخالف آزادانه بالا و پایین میروند. دیگر سیستم تعلیقها نظیر آنها که از میلههای نوسانی استفاده میکنند نیز جزء همین گروه مستقل به حساب میآیند.
گروه سوم سیستمهای تعلیق نیمه مستقل است. در این مورد حرکت یک چرخ بر روی چرخ مقابل نیز اثر میگذارد اما آنها به شیوه صلب به یکدیگر متصل نیستند. سیستم تعلیق عقب با مدل تیر پیچشی جزء این گروه به حساب میآید.
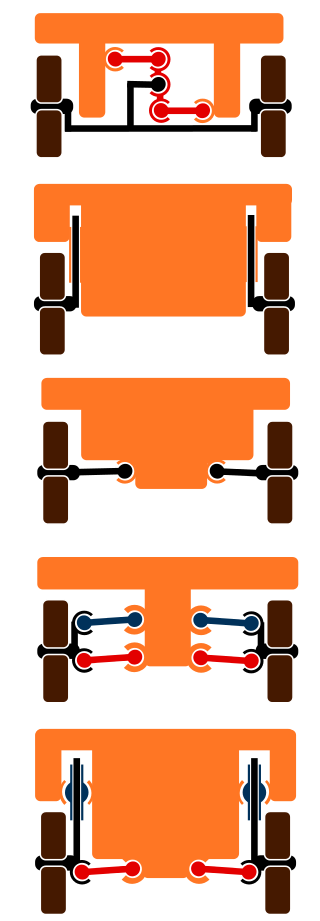
سیستمهای غیرمستقل با سیستم اتصالاتی که آنها را در جای خود قرار میدهد متمایز میشوند. اغلب هر دو عملکرد در دستهای از اتصالات با یکدیگر ترکیب میشود.
نمونههای اتصالات جانمایی شامل موارد زیر میشود:
در یک خودروی موتور جلو و دیفرانسیل عقب، سیستم تعلیق غیرمستقل در عقب بسته به این که دیفرانسیل بر روی اکسل باشد یا نه یا از نوع اکسل متحرک و یا اکسل De Dion است. اکسل متحرک طراحی سادهتری دارد اما وزن غیرفنری آن باعث افزایش پرش در چرخ خواهد شد.
از آنجا که در این سیستم زاویه تایر همیشه ثابت باقی میماند، سیستم تعلیق غیرمستقل (و نیمه مستقل) اکثرا در خودروهایی که نسبت به وزن خود بارهای سنگین جابجا میکنند اما نسبتا از فنرهای نرم استفاده میکنند و (به دلایل هزینه و سادگی) از سیستمهای تعلیق فعال استفاده نمیکنند، محبوب است. استفاده از سیستم تعلیق غیرمستقل تنها در خودروهای سنگینتر مرسوم است.

سیستم تعلیق مستقل در عقب یک خودروی تمام چرخ متحرک.
تنوع در سیستمهای تعلیق مستقل بیشتر بوده و شامل موارد زیر میشود:
از آنجا که چرخها در هنگام دور زدن، ترمزگیری و تغییر در شرایط اعمال بار عمود بر سطح صاف جاده نمیمانند، کنترل زاویه چرخ از اهمیت بالایی برخوردار میباشد. محور آونگی در خودروهای کوچک که فنر نرمی داشته و میتوانستند بارهای بزرگی حمل کنند، مرسوم بود زیرا زاویه چرخ از میزان بار اعمال شده مستقل بود. در تعدادی از سیستمهای تعلیق فعال و نیمه فعال ارتفاع رانندگی بالا نگه داشته میشد و بنابراین زاویه چرخها مستقل از میزان بار اعمالی بود. در خودروهای اسپورت، زاویه چرخ بهینه در هنگام دور زدن اهمیت بالایی دارد.
استفاده از جناقی و اتصالات چندگانه به منظور یافتن بهترین شرایط کنترل بیشتری به مهندس طراح نسبت به اکسل آونگی، مکفرسون و یا بازوی آونگی در بحث هندسه فراهم میکند. اما ممکن است بار مالی و الزامات فضای موجود این امر را محدود نماید. بازوهای نیمه پیرو در میانه این بحث قرار دارند و بین هندسههای مربوط به محور آونگی و اکسل آونگی تعادلی برقرار کردهاند.
در سیستمهای تعلیق نیمه مستقل چرخهای متصل به یک اکسل میتوانند نسبت به یکدیگر همانند سیستم مستقل حرکت کنند اما موقعیت یک چرخ بر موقعیت و ارتفاع چرخ دیگر اثر میگذارد. این اثر با پیچاندن و یا تحت فشار قرار دادن قطعات سیستم تعلیق تحت بار به دست میآید. مرسومترین نوع در سیستم تعلیق نیمه مستقل تیر پیچشی است.
سیستم تعلیق متمایل Tilting (همچنین معروف به سیستم تعلیق مایل Leaning) هندسه ساخت متفاوتی ندارد بلکه تنها یک فنآوری افزوده شده به سیستم تعلیق معمولی است.
این نوع سیستم تعلیق اکثرا شامل سیستم تعلیق مستقل (مانند مکفرسون یا بازوی A شکل یا جناقی) است. با افزوده شدن این سیستمها شاهد تمایل بیشتر در سیستم تعلیق نسبت به بدنه خودرو (شاسی) خواهیم بود.
این نوع سیستم تعلیق پایداری، چسبندگی به مسیر، شعاع چرخش خودرو و راحتی سرنشینان را بهبود میبخشد. به هنگام چرخش به راست یا چپ سرنشینان یا اشیا موجود در خودرو شتاب گرانش یا نیروی اینرسی به سمت شعاع بیرونی منحنی حرکت را حس میکنند. به همین دلیل است که موتورسواران در هنگام پیچیدن برای بهبود پایداری و کاهش احتمال سقوط به سمت مرکز پیچ خود را متمایل میسازند. اما برای خودرو با بیش از دو چرخ تا قبل از زمان حال و با سیستمهای مرسوم تعلیق این حرکت میسر نبود و سرنشینان در هنگام پیچ نیروی خارج از مرکز را حس کرده و پایداری و راحتی خودرو پایین میآمد. این نوع سیستم تعلیق متمایل راهحلی برای این مشکل است. اگر جاده خود شیب نداشته باشد، با استفاده از این سیستم راحتی فراهم خواهد شد، خودرو متمایل شده و ارتفاع مرکز گرانش را کاهش داده و پایداری افزایش پیدا میکند. از این نوع سیستم تعلیق در خودروهای مخصوص سرگرمی نیز استفاده میشود.
بعضی از قطارها نیز از این سیستم برای افزایش سرعت حرکت در پیچها استفاده میکنند.

سیستم شیطانک چیدمانی برای تعلیق است که در آن میل پیرو به چرخهای انتقال حرکت مجهز شده است. به دلیل مفصلبندی بین قسمت متحرک و پیرو، این سیستم تعلیق عملکرد بسیار منعطفی خواهد داشت. استفاده از این سیستم در مسیرهای بسیار ناهموار بسیار مناسب است.
از این نوع سیستم تعلیق در مریخنورد Curiosity استفاده شده است.
بعضی از خودروها نظیر قطارها بر روی مسیری متصل به زمین حرکت میکنند و بعضی دیگر نظیر تراکتورها، خودروهای برفرو و تانکها بر روی ریل پیوستهای که جزیی از خودرو است حرکت میکنند. اگرچه در هر دو مورد، مسیر حرکت نرمتر شده و فشار زمین کاهش مییابد، اما بسیاری از ملاحظات پیشین هنوز برقرار خواهد بود.
خودروهای زرهی نظامی مثل تانک، الزامات تعلیقی مخصوصی دارند. وزن آنها میتواند به بیش از 70 تن برسد و لازم است بر روی زمین تا جای ممکن سریع حرکت کنند. اجزای سیستم تعلیق آنها باید از مینهای زمینی و سلاحهای ضدتانک محافظت شود. این خودروها میتوانند تا 9 چرخ در هر طرف در مدلهای ریلی داشته باشند. بسیاری از خودروهای چرخی از 6 یا 8 چرخ بزرگ استفاده میکنند. بعضی از آنها مجهز به سیستم تنظیم باد مرکزی به منظور کاهش بار زمین یا حرکت در سطوح نامناسب هستند. به دلیل چرخهای بسیار بزرگ چرخاندن آنها امکانپذیر نیست، پس در بسیاری از خودروهای چرخی همانند مدلهای ریلی از سیستم دور در جا استفاده میشود.
اولین تانکهای موجود در جنگ جهانی اول تعلیق ثابت داشتند و در طراحی آنها هیچگونه حرکتی درنظر گرفته نشده بود. این وضعیت ناراحت با استفاده از فنر تخت یا فنر لول که در ماشینهای کشاورزی، اتومبیلها یا قطارها موجود بود بهبود داده شد، اما با این وجود هنوز هم راحتی سواری در آنها بسیار محدود بود.
به دلیل استفاده از موتورهای قدرتمندتر سرعت خودروها افزایش پیدا کرد و کیفیت سواری باید بهبود مییافت. در دهه 1930 سیستم تعلیق Christie ساخته شد و در آن از فنر لول درون بدنه استفاده شد و با استفاده از یک لنگ زنگولهای نیرو به سمت تغییر شکل فنر تغییر جهت داده میشد. سیستم تعلیق T-34 مستقیما از سیستم Christie الهام گرفته شده است. سیستم تعلیق Horstmann مدل دیگری بود که از ترکیب لنگ زنگولهای و فنر لول خارجی تشکیل شده بود و از دهه 1930 تا 1990 استفاده میشد. شیطانک در سیستم تعلیق M3 Lee/Grant و M4 Sherman مستقل و مشابه سیستم Hortsmann بوده و سیستم تعلیق در یک محفظه بیضوی نگه داشته میشد.
در زمان جنگ جهانی دوم نوع متداول دیگر سیستم تعلیق میلتعادل بود و نیروی فنری خود را از میلههای پیچشی درون هسته خود تامین میکرد. گاهی مواقع حرکت کمتری نسبت به مدل Christie داشت، اما بسیار مختصرتر بوده و فضای بیشتری درون هسته فراهم میکرد و در این مدل امکان استفاده از حلقههای برج گردان بزرگتر و در نتیجه تسلیحات سنگینتر فراهم میشد. سیستم تعلیق میلتعادل گاهی شامل کمکفنر نیز میشد و در خودروهای زرهی سنگین از جنگ جهانی دوم به بعد پرکاربردترین سیستم تعلیق به حساب میآمد. میلتعادلها در فضای نزدیک به کف نصب میشد و ممکن بود در این حالت نتوان تانک را با ارتفاع پایین ساخت و از دید پنهان نمود.
همانند ماشینها، میزان حرکت چرخ و نرخ فنریت، نرمی سواری و سرعت را در مسیرهای ناهموار تحت تاثیر قرار میداد. نرمی حرکت امری بسیار مهم بود، زیرا علاوه بر راحتی دقت شلیک در حال حرکت را افزایش میداد (مشابه کشتیهای جنگی که پایداری به دلیل ارتفاع مرکز سقل کاهش مییابد). همچنین باعث کاهش ضربه به تجهیزات دید و دیگر لوازم میشد. وزن غیرفنری و اتصالات ریل ممکن بود سرعت حرکت در جادهها را محدود سازد و بر عمر خودرو و دیگر اجزا اثر گذارد.
اغلب تانکهای آلمانی در جنگ جهانی دوم مانند تانک Panther از چرخهای اورلپ به منظور توزیع نیرو به شکل متناسب بر روی ریل و در نتیجه زمین بهره میبردند. این کار ظاهرا نقش مهمی در بهبود سرعت، دامنه حرکت و عمر تانک داشت و همچنین برای تانک یک نوار حمایتی پیوسته فراهم مینمود. بعد از جنگ به دلیل الزامات تعمیراتی قطعات مکانیکی پیچیده که در گل، شن، صخره، برف و یخ کار میکردند و همچنین هزینه بالا از آن استفاده نشد. اغلب صخرهها و گلهای یخزده بین چرخها گیر کرده و از چرخیدن آنها جلوگیری نموده و به چرخهای جادهای آسیب میزد. اگر یکی از چرخهای جادهای داخلی آسیب میدید، به منظور دسترسی به آن دیگر چرخها نیز باید باز میشد و فرایند تعمیراتی آن بسیار پیچیده و زمانبر بود.

سیستم تعلیق این تانک مدل Grand I چرخهای جادهای بر روی چرخ بارکش یا شیطانک دارد.
در سیستم تعلیق اتومبیل، بازوی کنترل یا بازوی A شکل یک اتصال تعلیق قلابدار بین شاسی و عضو نگهدار چرخ است.
انتهای داخلی (شاسی) بازوی کنترل به وسیله یک لولا معمولا با بوش لاستیکی متصل شده است. بنابراین میتواند موقعیت انتهای بیرونی را با تنها یک درجه آزادی کنترل نماید و فاصله شعاعی از محل نصب درونی را حفظ نماید. اگرچه به صورت عامدانه آزاد به حرکت نیست، اما بوش بازو را از حرکت به عقب و جلو منع نمیکند؛ این حرکت توسط یک اتصال جدا یا میل شعاعی مهار میشود.
این مورد متضاد با جناقی است. جناقیها مثلثی بوده و در داخل دو یاتاقان با فاصله زیاد از هم دارند. این یاتاقانها انتهای بیرونی جناقی را از حرکت به جلو و عقب مهار میکند و بدون نیاز به اتصالات اضافه، دو درجه آزادی آن را کنترل میکند.
اکثر بازوهای کنترل اتصال پایینی سیستم تعلیق را تشکیل میدهند. تعداد محدودی از طراحیها از آن به عنوان اتصال بالایی استفاده میکنند و آن را به همراه جناقی در پایین به کار میبرند. میل شعاعی اضافه سپس به بازوی بالایی وصل میشود.
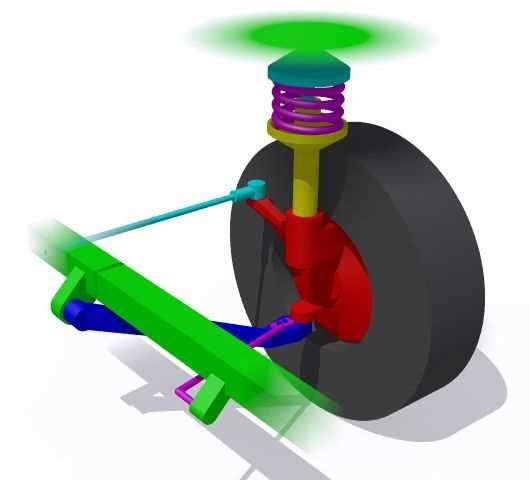
سیستم تعلیق مکفرسون، بازوی کنترل مسیر به رنگ آبی تیره
بازوهای کنترلی اغلب به عنوان جزیی از سیستم تعلیق مستقل مکفرسون برای قسمت جلو به شمار میآید. بازوهای کنترل عمود بر محور خودرو بوده و به بازوهای کنترلی مسیر معروف هستند. یک میله شعاعی قطری این بازو را از حرکت به جلو و عقب منع میکند.
در طراحی اولیه مکفرسون یک میله ضدپیچش به عنوان میله شعاعی به کار میرفت. بدین منظور باید این میله با اتصال توپی وصل میشد تا بتواند کنترل طولی را تامین کند. در اکثر طراحیهای معاصر که هنوز هم به نام مکفرسون شناخته میشوند، میله شعاعی و میلتعادل جدا بوده و میلتعادل بر روی لاستیکچاکدار نصب میشود.
از یک بازوی کنترلی برای حمل بار تعلیق و انتقال آن به فنر یا کمکفنر استفاده میشود. سیستم تعلیق میلتعادل معمولا به همین طریق کار میکند و در آن انتهای بیرونی میلتعادل به یاتاقان داخلی بازوی کنترل متصل شده است.
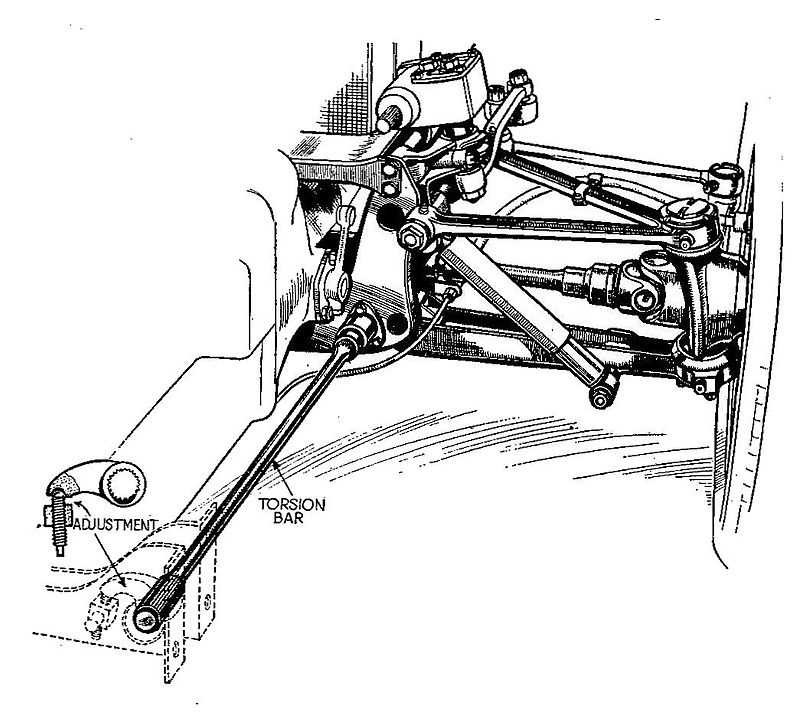
سیستم تعلیق میلتعادل در سیتروئن مدل Traction Avant با میلتعادلهای متصل به بازوی کنترلی پایینی
در اتومبیلها، سیستم تعلیق جناقی دوبل یک سیستم تعلیق مستقل بوده که از دو بازوی جناقی شکل (اغلب موازی) به منظور نگهداری چرخ در موقعیت خود بهره میبرد. هر قطعه جناقی یا بازو دو نقطه اتصال بر روی شاسی داشته و در در قسمت قوزک یک اتصال دارد. کمکفنر و فنر لول به منظور کنترل حرکت عمودی بر روی جناقیها (طبقها) نصب میشوند. طراحی جناقی دوبل به مهندسان اجازه میدهد که بتوانند به دقت حرکت چرخ در محدوده تعلیق را کنترل کرده و عواملی نظیر زاویه چرخ، الگوی پاشنه، ارتفاع مرکز پیچش، شعاع مالش، سایش و دیگر موارد را کنترل نمایند.

اتصال جناقی و قطعه بالایی با رنگ زرد مشخص شده است.
سیستم تعلیق جناقی دوبل به سیستم بازوی A شکل دوبل نیز معروف است هرچند بازوها خود میتوانند A شکل، L شکل و یا حتی به صورت یک میله ساده باشند. اتصال جناقی یا A شکل را میتوان به تنهایی در دیگر انواع تعلیق همانند انواع مختلف سیستم مکفرسون به کار گرفت. بازوی بالایی معمولا به دلیل القای زاویه چرخ منفی در هنگام پرش سیستم تعلیق کوتاهتر بوده و به سیستم تعلیق SLA یا بازوهای دراز و کوتاه معروف است. هنگامی که خودرو در حال پیچیدن است، پیچش بدنه منجر به زاویه چرخ مثبت در چرخ درونی تحت بار میشود.
بین انتهای بیرونی بازوها یک قوزک وجود دارد. قوزک شامل یک پین اصلی برای حرکت شعاعی افقی در طراحیهای قبلی و یک لاستیک یا بوش برای حرکت قلابی عمودی میباشد. در طراحیهای جدیدتر، یک اتصال توپی در هر انتها اجازه حرکت را به سیستم میبخشد. یک پوسته یاتاقان یا در تعدادی از طراحیهای قدیمی یک دسته که بر روی آن یاتاقانهای چرخ قرار دارد به قوزک در مرکز آن متصل میشود.
به منظور مقاومت در برابر بارهای به سمت عقب و جلو مانند شتابگیری یا ترمز، بازوها به دو بوش یا اتصال توپی در قسمت بدنه نیاز دارند.
در انتهای قوزکی، معمولا از اتصالات توپی استفاده میشود و در آن بارهای فرمان از طریق سیبک فرمان و جناقیهای A شکل یا L شکل تحمل میشود. در خودروهای سواری استفاده از بازوی L شکل محبوبتر است، زیرا فرمانپذیری و راحتی بیشتری دارد. بوش همراستا با چرخ را میتوان نسبتا سخت در نظر گرفت تا بارها را در هنگام دور زدن بهتر تحمل کند و اتصال خارج از خط را به منظور مهار نیروهای ناشی از ضربه نرمتر انتخاب کرد. برای سیستم تعلیق عقب میتوان از یک جفت اتصال در هر دو انتهای بازو بهره برد و ساختاری H شکل در نمای از بالا پدید آورد. همچنین مادامی که شکل دیگر جناقی بتواند کنترل قسمت بالا را عهدهدار باشد، از یک شفت متحرک با طول ثابت به عنوان جناقی بهره برد. این چیدمان با موفقیت در خودروی جگوار IRS به کار رفته است. در نمای از کنار، سیستم تعلیق یک اتصال 4 میلهای است و با بوشها و اتصالات توپی موجود میتوان به راحتی زاویه چرخ را تنظیم نمود. بوشها و اتصالات توپی مختلف نیازی نیست که در محورهای افقی، موازی با خط مرکز خودرو قرار گرفته باشند. اگر آنها با زاویه نسبت به هم قرار گرفته باشند، میتوان تجهیزات مربوط به ضدشیرجه و ضدچمباتمه را در آن کار گذاشت.
در بسیاری از خودروهای مسابقهای، فنرلولها و کمکفنرها درون بدنه کار گذاشته میشوند. سیستم تعلیق از یک لنگ زنگولهای برای انتقال نیرو در انتهای قوزکی تعلیق به فنرلول و کمکفنر داخلی استفاده میکند. اگر در هنگام عبور از دستانداز به میله فشار وارد شود، آنگاه «میله فشاری» نامیده میشود (و در نتیجه میله باید به انتهای میله بالایی به سمت بالا متصل شود). هنگامی که چرخ بلند میشود، میله فشاری فنر داخلی را از طریق یک لولا یا سیستم لولا فشرده میسازد. چیدمان برعکس «میله کششی» میله را حین عبور از دستانداز به سمت خود کشیده و میله باید به بالای میله بالایی به سمت پایین متصل شود. با جانمایی فنرلول و کمکفنر در داخل وزن کلی سیستم تعلیق افزایش پیدا میکند، اما وزن غیرفنری کاهش یافته و طراح در این حالت میتواند خودرو را با آیرودینامیک بهتری طراحی کند.

سیستم تعلیق جناقی دوبل (قسمت جلو) در خودروی ساب مدل Quantum IV
سیستم تعلیق طبقهای کوتاه و بلند به سیستم جناقی دوبل با طولهای نامساوی معروف است. طبق بالایی معمولا A شکل است و کوتاهتر از طبق پایینی است که میتواند A شکل یا L شکل یا گاهی یک جفت بازوی کششی/فشاری باشد. در مورد آخر به این سیستم مولتیلینک یا سیستم تعلیق اتصال توپی دوبل گفته میشود.
مکانیسم اتصالات 4 میلهای تشکیل یافته توسط طبقها با طول نامساوی باعث ایجاد تغییر در زاویه چرخ به هنگام دور زدن میشود و به این ترتیب سطح تماس با زمین مربعی باقی میماند و به این ترتیب ظرفیت دورزنی نهایی خودرو افزایش مییابد. همچنین باعث میشود که لبه خارجی لاستیک تایر خودرو کمتر فرسوده شود.
سیستم SLA را میتوان به عنوان یک دسته کوتاه شناسایی کرد که در آن اتصال توپی بالایی بر روی دسته درون چرخ قرار داشته و یا در طول دسته بوده و در آن دسته حول چرخ بوده و اتصال توپی بالایی بالای تایر مستقر میشود.
سیستمهای تعلیق SLA با دسته کوتاه نیازمند بوشهای محکمتری در بدنه هستندT زیرا ترمزگیری و دور زدن نیروهای بزرگتری اعمال میکنند. همچنین آنها پین اصلی ضعیفتری دارندT چون بستهبندی اتصال بالایی و ترمزها درون چرخ دشوار است.
سیستمهای تعلیق SLA با دسته بلند هندسه پین اصلی بهتری دارندT اما نزدیکی دسته به تایر استفاده از تایرهایی با ابعاد بزرگتر و یا زنجیر چرخ را محدود میکند. موقعیت اتصال توپی بالایی مستلزم طراحی خاص صفحه فلزی بالای آن است.
سیستم تعلیق جناقی دوبل اولین بار در دهه 1930 به بازار معرفی شد. خودروساز فرانسوی سیتروئن از آن در سال 1934 بر روی مدلهای Rosalie و Traction Avant استفاده کرد. شرکت خودروسازی پاکارد در شهر دیترویت ایالت میشیگان در سال 1935 از آن بر روی خودروی One-Twenty خود استفاده کرد و از آن به عنوان مشخصهای ایمن در تبلیغات یاد کرد. طی آن سالها سیستم مکفرسون تنها در صنعت هوایی و در سیستم فرود چرخها استفاده میشد. بعد از آن شرکت فورد در سال 1951 تصمیم گرفت که بر روی خودروهای سواری کوچک خود مانند Consul و Zephyr از سیستم مکفرسون استفاده کند. بنابراین استفاده از سیستم جناقی دوبل از قبل متداول بوده و ارتباطی بین این سیستم و مکفرسون وجود ندارد.
جناقی دوبل معمولا خصوصیات دینامیکی بهتر و همچنین تواناییهای فرمانپذیری بهتری داشته و به همین دلیل در طول تاریخ در اغلب خودروهای اسپورت و مسابقهای از آن استفاده شده است. جناقی دوبل در خودروهایی نظیر آلفارومئو، لانسیا، مازراتی، مزدا MX-5، MG، Saab، هوندا، مرسدس بنز، تویوتا و پونتیاک استفاده شده است. در استون مارتین DB7، روور 600، هوندا NSX، هوندا S2000 و هوندا Prelude از سیستم نادر جناقی دوبل در هر دو سمت عقب و جلو مطابق با تجربهای که مهندسان هوندا از فرمول یک بدست آورده بودند، استفاده کردند. از سیستم تعلیق طبقهای کوتاه و بلند، به عنوان مدلی از سیستم تعلیق جناقی دوبل در سیستم تعلیق جلوی خودروهای متوسط تا بزرگ همانند هوندا Accord (که در مدلهای 2013 به بعد با مدل ارزانتر و سادهتر مکفرسون جابجا شد)، پژو 407، سیتروئن C5، پژو 508 GT یا مزدا 6 (که آن هم در مدلهای 2014 به بعد با مکفرسون تعویض شد) استفاده شده است. هوندا Civic تا سال 2000 از سیستم جناقی دوبل استفاده میکرد و از سال بعد آن را با سیستم مکفرسون تعویض نمود. این سیستم کمترین تغییر در زاویه چرخ را در شرایط دستانداز و پرش چرخ فراهم میکرد.

سیستم تعلیق جناقی دوبل، نسبت به دیگر انواع، برای مهندسین طراح امکان انتخاب بیشتری فراهم میکرد. فهم اثر حرکت هر مفصل بسیار راحتتر بوده و بنابراین سینماتیک سیستم تعلیق را میشد به راحتی تنظیم کرده و حرکت چرخ را بهینه کرد. از آنجا که بار وارد شده به هر قطعه به راحتی مشخص میشود، میتوان از قطعات با وزن کمتر و بهینه در این سیستم استفاده نمود. برخلاف سیستم مکفرسون که فقط در ابتدای پرش چرخ زاویه منفی ایجاد نموده و در ادامه زاویه چرخ مثبت میشود، سیستم جناقی دوبل در کل مسیر حرکت پرش چرخ زاویه منفی را حفظ مینماید.
سیستم جناقی دوبل در مقایسه با مکفرسون فضای کمتری اشغال میکند، اما پیچیدهتر بوده و بنابراین گرانتر خواهد بود. به دلیل افزایش تعداد قطعات استفاده شده در سیستم تعلیق، زمان تعمیرات بیشتری در مقایسه با سیستم مکفرسون خواهد داشت. از طرف دیگر نسبت به سیستم تعلیق گرانتر و پیچیدهتر مولتیلینک، امکانات کمتری برای انتخاب کردن دارد.
شما میتوانید برای مشاوره در مورد قطعات لوازم یدکی هیوندای و لوازم یدکی کیا با کارشناسان ما در بخش تماس با ما تماس حاصل فرمایید.


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








