


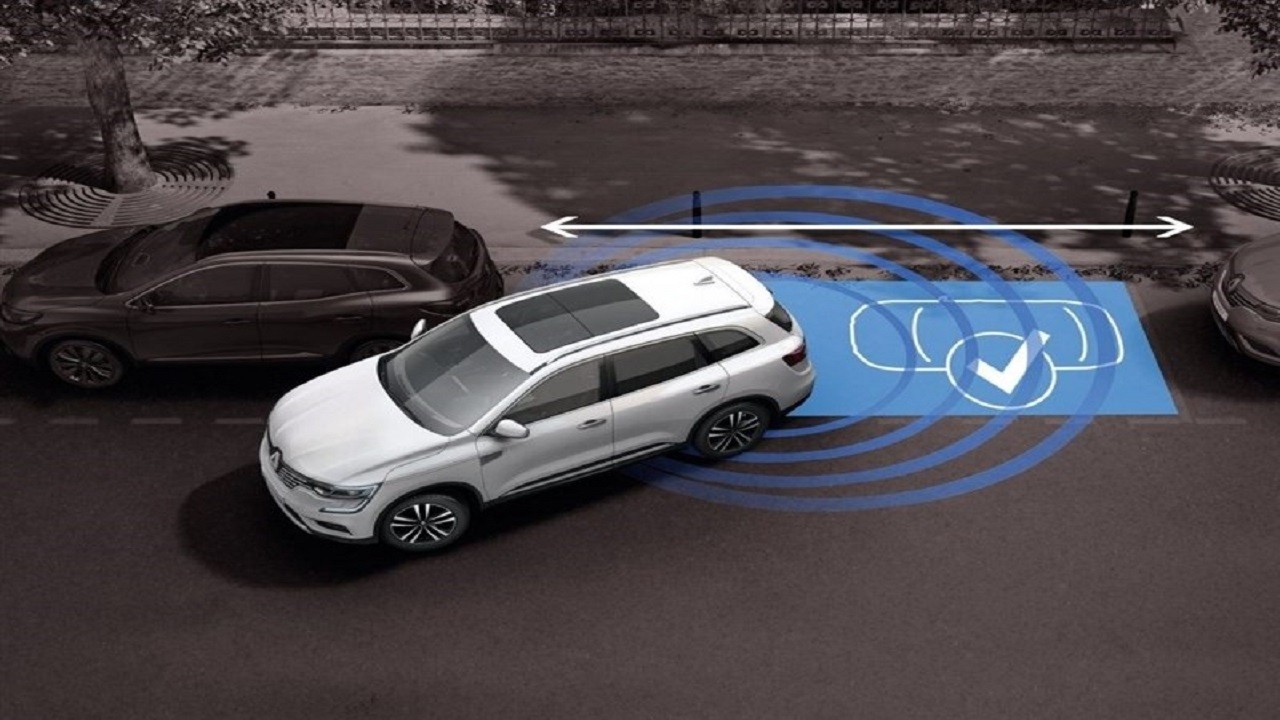
سنسورهای پارک، نوعی سنسور مجاورتی هستند. این سنسورها به گونهای طراحی شدهاند که در صورتی که موانعی در زمان پارککردن وجود داشته باشد، به راننده هشدار داده میشود. در این سیستمها از سنسورهای الکترومغناطیسی یا از سنسورهای فراصوتی استفاده میشود.
این سیستمها دارای تشخیصدهندههای مجاورتی فراصوتی هستند که از آنها برای اندازهگیری فاصله خودرو نسبت به موانع مجاور آن استفاده میشود. این سنسورها بر روی سپرخودرو قسمت های جلو یا عقب نصب میشوند یا اینکه میتوان آنها را به صورت کوچکشده در مجاورت توریها یا تورفتگیها مشاهده کرد.
این سنسورها پالسهای صوتی از خود ساطع میکنند. همچنین یک واحد کنترلی نیز تعبیه شده است که بازه زمانی بازگشت سیگنالهای برگشتی را اندازهگیری کرده و فاصله با اشیا مجاور را اندازهگیری میکند. در نتیجه، سیستم با استفاده از هشدارهای صوتی، راننده را از وجود این موانع آگاه میسازد. تواتر این صوت نیز نشاندهنده میزان نزدیکی به موانع است، به طوری که هر چه این صدا سریعتر باشد، اشیای مجاور نزدیکتر هستند و در صورتی که خودرو از یک حدِ از پیشتعیینشده به مانع نزدیکتر شود، صدای بوق به صورت ممتد در میآید. این سیستمها میتوانند دارای وسایل تصویری مانند LCD یا LED هم باشند که فاصله خودرو تا شیء را نشان دهند. در برخی از خودروها ممکن است صفحات نمایشگر هم وجود داشته باشند، به طوری که اشیای مجاور خودرو به صورت بلوکهای رنگی بر روی آنها نشان داده شوند.
زمانی که راننده دنده عقب میزند، سنسورهای عقب فعال میشوند و به مجرد آنکه دنده دیگری را انتخاب کند، این سنسورها به حالت غیرفعال در میآیند. سنسورهای جلو را میتوان به صورت دستی فعال نمود و زمانی که سرعت خودرو از حدی مشخص بیشتر میشود، این سنسورها غیرفعال میشوند -تا دیگر هشدارهای آزاردهنده بعدی، راننده را اذیت نکنند.
با توجه به اینکه سیستمهای فراصوتی بر اساس انعکاس موجهای صوتی کار میکنند، بنابراین در صورتی که اشیا به صورت مسطح و پهن باشند یا در صورتی که این موانع، آنقدر بزرگ نباشند که بتوانند سیستم را برای تولید صدا تحریک کنند، ممکن است این سیستم نتواند آنها را تشخیص دهد. از جمله این موارد میتوان به ستونها و تیرکهای باریک یا اشیای طولیای اشاره نمود که به صورت مستقیم بر روی خودرو یا در نزدیکی یک شیء قرار گرفتهاند. اشیایی هم دارای سطوح مسطح هستند و نسبت به راستای عمود زاویه دارند، موجهای صوتی بازگشتیای را ایجاد میکنند که از سنسورها دور هستند و بنابراین، سیستم نمیتواند آنها را تشخیص دهد. همچنین، اشیای نرمی مانند چوب یا خزهها که صداهای قوی را جذب میکنند، ممکن است عملکرد تشخیصی سیستم را تضعیف نمایند.
سنسور پارک فراصوتی
سنسورهای الکترومغناطیسی برای پارک (EPS) در سال 1992، توسط موارو دل در سنگاپور، مجدداً ابداع شده و به صورت پتنت ثبت شده است. سنسورهای الکترومغناطیسی بر این اساس کار میکنند که خودرو به صورت آرام و نرم حرکت میکند و قرار است که به اشیای مجاور خود برخورد نکند. در صورتی که جسمی تشخیص داده شود، این سنسورها همچنان سیگنالی را تولید میکنند که حضور آن جسم را نشان میدهد و حتی در صورتی که خودرو متوقف هم شود، باز هم این سیگنال داده میشود. در صورتی که خودرو باز هم به حرکت خود به سمت عقب ادامه داده و به جسم نزدیکتر شود، این سیگنالهای صوتی بلندتر میشوند. سنسورهای الکترومغناطیسی برای پارک به گونهای طراحی شدهاند که برای نصب آنها نیاز به سوراخکردن سپر وجود ندارد. این سنسورها در سمت داخل سپر نصب میشوند، به طوری که خودروی شما باز هم همان نمای «نوی کارخانهای» خود را دارد.

سنسور پارک بر روی گلگیر خودرو
مانیتورهای نقطه کور هم گزینههایی هستند که کارهایی فراتر از پایش اطراف خودرو را انجام میدهند. این سیستمها میتوانند دارای «هشدار ترافیک متقاطع» باشند که به راننده هشدار میدهند که وقتی خودروهای دیگر در اطراف خودروی او به او نزدیک میشوند، چگونه از فضای پارک بیرون بیاید.
در ایالات متحده، از سال 2018 به بعد الزام شده است که تمامی خودروهای جدید باید مجهز به دوربینهای پشتیبان در عقب خود باشند.
شرکت تویوتا در سال 1982 از سنسور فراصوتی در عقب تویوتا کرونا استفاده کرد و تا سال 1998 نیز همچنان این سنسورها را نصب میکرد. در 13 دسامبر سال 1984، Massimo Ciccarello و Ruggero Lenci، درخواست ثبت اختراع خود برای سنسورهای پارک فراصوتی را در ایتالیا ارائه کردند و در 16 ماه نوامبر سال 1988 بود که وزارت صنعت این کشور، پتنتی را برای اختراع صنعتی آنها به شماره n. 1196650 اعطاء نمود.
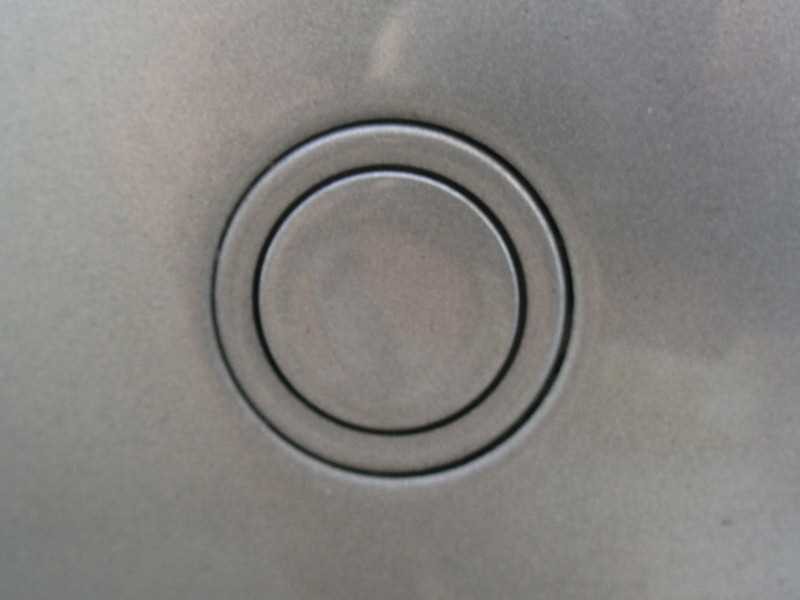
پارک خودکار، یک سیستم مانور خودران خودرو است که خودرو را از یک خط ترافیکی به نقطه پارک میبرد تا یک پارک موازی، عمودی یا زاویهای انجام دهد. سیستم پارک خودکار، منجر به افزایش راحتی و ایمنی در رانندگی در محیطهای محدودشدهای میشود که در آنها لازم است تا تمرکز و تجربه بیشتری برای راندن خودرو وجود داشته باشد. مانور در پارک نیز به وسیله کنترل هماهنگشده زاویه فرمان و سرعت به دست میآید. برای این کار، مکان واقعی در محیط نیز در نظر گرفته میشود تا از حرکت خودرو در فضای موجود بدون برخورد آن به اطراف اطمینان حاصل شود.
خودرو، مثالی از یک سیستم غیرهولونومیک است که در آن، تعداد فرمانهای کنترلی موجود کمتر از تعداد مختصاتی است که مکان و جهت آن را نشان میدهند.
یکی از سیستمهای کمکی اولیه برای پارک خودرو به صورت دستی بوده است. در این سیستم، از چهار جک چرخدار برای بلندکردن خودرو و سپس راندن آن به کنارهها و در فضای موجود برای پارک استفاده شده است. این سیستم مکانیکی در سال 1934 پیشنهاد شده بود، اما هرگز از آن در مدلهای مختلف خودروهای تولیدی استفاده نشد.

نمایش سیستم پارک خودکار بر روی خودروی Lexus LS
یکی از اولین نمونهها برای سیستم پارک موازی خودکار، در اواسط دهه 1990 برای خودروی برقی Ligier در INRIA توسعه داده شده است. فناوری مورد استفاده در این سیستم، از سوی بیشتر خودروسازان اصلی پذیرفته شده است. این خودروسازان از آپشن پارک خودکار در خودروهای امروزی خود استفاده مینمایند.
الگوریتمهای مخصوص برای پارک موازی خودکار، ابتدا یک فضای کافی برای پارک را در کنار جاده مشخص مینمایند. سپس، یک مکان شروع راحت برای خودرو را در جلوی فضای پارک در نظر میگیرند و در نهایت، یک پارک موازی را انجام میدهند. در بیرون آوردن خودکار از پارک نیز فضای موجود برای حرکت خودرو در محل پارک مشخص میشود. سپس، خودرو در نقطهای مناسب در عقب محل پارک قرار میگیرد و در نهایت، خودرو به حرکت در آمده، از محل پارک بیرون آمده و در خط عبور و مرور قرار میگیرد.
مفهوم کلیدی که در پس پارک خودکار وجود دارد، این است که باید پروفایلهای کنترلی پایه برای زاویه فرمان و سرعت، برنامهریزی و مقداردهی شوند. بدین ترتیب، شکل مطلوب برای مسیر خودرو در درون فضای موجود برای پارک مشخص میشود. حرکت برای پارک نیز به صورت ترتیبی از حرکتهای کنترلشده انجام میشود. دادههای مربوط با استفاده از سنسورهایی که در سیستمهای سروو خودرو نصب شدهاند و همچنین بر اساس اندازهگیریهای محیطی به دست میآیند. کنترلهای فرمان و سرعت، در لحظه محاسبه و اجرا میشوند. این روش، شکلهای مختلفی را برای مسیر به دست میدهد تا خودرو بتواند در پارک مانور انجام دهد.
در سال 1992، شرکت فولکسواگن یک فناوری پارک خودکار ارائه نمود. در این سیستم، از فرمان برای هر چهار چرخ استفاده میشد. این سیستم در خودرو مدل مفهومی فوتورا IRVW (تحقیقات یکپارچه فولکسواگن) مورد استفاده قرار گرفت و به خودرو اجازه میداد تا در زمان پارک، به سمت جانبی حرکت کند. اما هیچگاه یک نسخه تجاری از این مدل ارائه نشد. از این ایده فرمان چهارچرخ، پس از بازنگری و اصلاح در خودروی برقی ROboMObil در مرکز هوافضای آلمان استفاده شد. در این سیستم، خودرو در جلوی یک نقطه پارک خالی قرار میگیرد. سپس، هر چهار چرخ خود را به صورت عمود بر جهت خود تغییر مسیر داده تا برای حرکت به جانب آماده شود. بدین ترتیب، جای لاستیکهای خودرو بر روی زمین باقی میماند.
در سال 2004، گروهی از دانشجویان دانشگاه لینکوپینگ با شرکت ولوو همکاری نموده و پروژه خودروی Evolve را پیش بردند. در خودروی Evolve پارک به صورت موازی، با استفاده از یک سری سنسور و کامپیوتر برای کنترل فرمان، شتابدهی و ترمز Volvo S60 انجام میشود.
در سیستمهای پارک خودکار، از روشهای مختلفی برای شناسایی اشیای پیرامون خودرو استفاده میشود. سنسورهایی که بر روی سپرهای جلو و عقب خودرو نصب میشوند، هم به عنوان ارسالکننده و هم به عنوان دریافتکننده عمل میکنند. این سنسورها، سیگنالی را ارسال مینمایند. این سیگنال پس از برخورد به موانع نزدیک به خودرو بر میگردند. سپس، خودرو زمان پیمایش و برگشت این سیگنال را اندازهگیری نموده و بر اساس آن، محل مانع را تعیین مینماید. در سایر سیستمها از دوربینهای مختلف، مانند فناوری چندنمایی یا رادارهایی برای تشخیص موانع و اندازهگیری فضای پارک و فاصله نسبت به کناره جاده استفاده میشود.
اثبات شده است که سیستمهای پارک خودرو میتوانند با کاهش میزان استرس مردم در حین پارک موازی و همچنین مانور در محوطههای پارکینگ، راحتی و ایمنی را برای آنها فراهم آورند.

در سال 2003، شرکت تویوتا فروش خودروهای هیبریدی پریوس ژاپنی خود را آغاز کرد. این خودروها مجهز به سیستم پارک موازی خودکار بودند که به صورت یک آپشن با نام کمک پارک هوشمند بر روی خودرو ارائه میشد. در سال 2006، لکسوس نیز یک سیستم پارک خودرو بر روی خودروهای خود تعبیه کرد و بدین ترتیب، خودروهای سدان Lexus LS خود را مجدداً طراحی نمود؛ این سیستم میتوانست پارکهای موازی و زاویهدار را انجام دهد. در سال 2009، شرکت فورد سیستم کمک پارک فعال خود را معرفی نمود و ابتدا آن را در مدلهای لینکولن خود به کار برد؛ این سیستم میتوانست پارک موازی انجام دهد. در سال 2010، شرکت BMW سیستمی به نام «کمک پارک» را بر روی خودروهای سری 5 خود ارائه نمود که میتوانستند پارک موازی را انجام دهند.
تا سال 2012، چندین خودروساز سیستمهای مختلفی را برای پارک خودکار ارائه کردند. شرکتهای فورد و لینکولن، سیستمهای کمک پارک فعال را بر روی خودروهای Ford Focus، Fusion، Escape، Explorer و Flex و Lincoln MKS و MKT پیاده کرد. شرکتهای تویوتا و لکسوس نیز از سیستمهای کمکپارک پیشرفته بر روی خودروهای تویوتا Prius V و لکسوس LS460 و LS460 استفاده کردند. شرکت BMW نیز در خودروهای نسل شش جدید سری 3 خود از یک سیستم کمک پارک استفاده کرد. شرکت آئودی از سیستم کمک پارک بر روی خودروی Audi A6 خود استفاده کرد. شرکت مرسدس بنز از سیستمی به نام parktronic بر روی مدلهای کلاس C، کوپه کلاس CLS، شاسیبلندهای کلاس M، کلاس E، کلاس S، GL350، شاسیبلند GL450 (به صورت استاندارد بر روی GL550) و کلاس R استفاده نمود که هر یک قیمتهای مختلفی داشتند.
شرکت جیپ نیز یک سیستم پارک خودکار به صورت موازی و عمودی به نام ParkSense معرفی نمود. این شرکت، از این سیستم در مدل چروکی مدل 2014 خود استفاده کرد. کرایسلر نیز یک سدان 200 جدید مدل 2015 معرفی کرد که در آن، سیستم ParkSense به عنوان بخشی از بسته SafetyTec ارائه شده بود.
در سال 2015، شرکت بوش برنامهریزی نمود تا یک سیستم پارک کاملاً خودکار ارائه نماید. این سیستم بدون راننده، به راننده امکان میدهد تا از خودروی خود خارج شده و یک سیستم پارک خودکار را از روی گوشی همراه هوشمند خود فعال سازد. این سیستم، مقدار حرکت و مانور پارک را تعیین کرده و اطراف را پایش مینماید. سیستم کمک پارک خودروی BMW i3 را نیز میتوان از روی گوشی هوشمند فعال نمود.

برخورد از عقب، زمانی اتفاق میافتد که راننده به صورت دندهعقب میرود و به یک جسم، شخص یا خودروی دیگر برخورد میکند. هر چند بیشتر خودروها مجهز به آینههای عقب هستند و این آینهها فضای خوبی از عقب خودرو را به او نشان میدهند، اما با استفاده از این آینهها نمیتوان فرزندان خردسال یا اشیایی که نزدیک به زمین هستند را مشاهده نمود. این نقاط را نقطه کور خودرو مینمایند، به ویژه اگر درست در پشت خودرو حضور داشته باشند. این قسمت را «ناحیه مرده» میگویند. نقاط کور در کامیونهای بزرگ، بزرگتر است و بنابراین، در این خودروها حتی خودروهای دیگر یا بزرگسالان هم دیده نمیشوند.

برخورد خودرو از عقب با یک تیر چراغ برق
بر اساس تحقیقی که توسط سایت حامی کودکان به نام kidsandcars.org انجام شده است، برخورد از عقب به عنوان دلیل اصلی (34%) برای از بین رفتن کودکان زیر 15 سال از سال 2006-2010 بوده است.
گزارش مرکز کنترل بیماریهای ایالات متحده از سال 2001-2003 حاکی از آن است که 7475 کودک (CI = 4453-10497) (2492 کودک در هر سال) زیر 15 سال به خاطر تصادفات رانندگی از عقب، تحت درمان قرار گرفتهاند. حدود 300 کشته نیز به واسطه برخورد از عقب ثبت شده است.
بر اساس نتایج اداره ملی ایمنی ترافیک بزرگراهها نیز بیشتر برخوردها از عقب به واسطه عوامل زیر حادث میشوند:
راننده خودرو که دندهعقب میرود و به یک جسم، شخص، خودروی دیگر یا یک دارایی دیگر میزند، معمولاً در اینگونه موارد مقصر شناخته میشود.
سازمانهای پیشگیری از این حوادث بیان مینمایند که والدین بر اساس عرف عمل میکنند و اقدامات ایمنی خاصی را اتخاذ مینمایند. به عنوان مثال، آینههای نمای دورتادور نصب میکنند، از سیستمهای تشخیص صوتی استفاده مینمایند، دوربینهای پشتی نصب کرده یا به نوعی از سنسورهای عقب استفاده مینمایند. علاوه بر این، پشتیبانی ایمنتر زمانی انجام میشود که راننده به طور کامل به اطراف میپیچد و به جای آنکه به آینههای خود اعتماد کند، به آینه عقب نگاه میکند. این کار باعث میشود تا میدان دید وسیعتری داشته باشد و بهتر بتواند خودروی خود را کنترل کند.
در ایالات متحده، قانون ایمنی حمل و نقل با عنوان کودکان کامرون گالبرانسن مربوط به سال 2007، دبیرخانه فدرال حمل و نقل را الزام نموده تا مقرراتی را برای ایمنی در برخورد از عقب تدوین نماید. این مقررات باید ظرف مدت 3 سال تدوین شوند و تمامی خودروها باید ظرف مدت 4 سال از نهاییشدن این مقررات، آن را به طور کامل رعایت نمایند. تا سال 2012، این مقررات همچنان در حال مطالعه و بررسی بودهاند. بر روی حدود نیمی از خودروهای مدل سال 2012، پیش از این دوربینهای پشتیبانی از پشت نصب شدهاند.
چنانچه قصد خرید لوازم یدکی هیوندای و یا لوازم یدکی کیا را دارید و نیاز به مشاوره و راهنمایی در این خصوص را دارید میتوانید با کارشناسان ما تماس بگیرید تا شما را در این زمینه راهنمایی کنند.


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








