

دوچرخهها معمولا برای انتخاب نسبتهای مختلف دنده، یک سیستم دارند. دو نوع اصلی وجود دارد: چرخدندههای شانژمان و چرخدندههای توپی. نوع شانژمان رایجترین و قابلمشاهدهترین نوع با استفاده از چرخ زنجیر است. به طور معمول چندین چرخدنده در مونتاژ چرخ زنجیر عقب، متصل به چرخ عقب وجود دارد. معمولا چند نوع دیگر از این چرخزنجیرها نیز به مجموعه جلو اضافه میشوند. چند برابر کردن تعداد چرخدندههای زنجیرخور در جلو نسبت به تعداد چرخدندههای عقب، تعدادی نسبت دنده ایجاد میکند که اغلب "سرعت" نامیده میشود.
چرخدندههای توپی از دنده اپیسیکلیک استفاده میکنند و در داخل محور چرخ عقب قرار دارند. به دلیل کمبود فضای، آنها معمولا سرعتهای کمتری ارائه میدهند، اگر چه حداقل یکی از آنها به ۱۴ نسبت دنده رسیدهاست و شرکت فالبروک تلکنولوژی نیز گیربکسی با بینهایت نسبت دنده تولید میکند.
تلاشهای زیادی صورتگرفته است تا دوچرخه را با یک جعبهدنده بسته متناسب کنند، که مزایای آشکاری برای روانکاری بهتر، آببندی و تعویض دنده دارد. اینها معمولا همراه با یک شفت محرک بودهاند، به طوری که یک جعبهدنده با یک زنجیره سنتی (مانند دنده هاب) هنوز هم بسیاری از معایب شانژمان برای یک زنجیر را دارد. جعبهدندههای دوچرخه در جعبهای قرار دارند که جایگزین براکت پایینی سنتی میشود. نیاز به یک چارچوب اصلاحشده یک مشکل جدی برای بهره برداری از آنها بوده است. یکی از جدیدترین تلاشها برای ساختن یک جعبهدنده برای دوچرخه، پینیون ۱.۱۸P هجده سرعتی است. این مدل یک جعبهدنده سربسته دارد، اما هنوز هم یک زنجیرهای سنتی وجود دارند. هنگامی که به یک دوچرخهی سیستم تعلیق عقب وصل شود، قفل را نیز نگه میدارد، مانند زنجیر سفت کن محفظهی نگهداری فلکه واسطه، البته بدون لقی کم فلکه واسطه.
علل شکست جعبهدنده دوچرخه شامل دندانههای فرسوده، آسیب ناشی از یک زنجیره معیوب، آسیب ناشی از انبساط حرارتی، دندانه های شکسته به دلیل نیروی زیاد پدال زدن، تداخل با اشیا خارجی، و نبود روانکاری به دلیل سهلانگاری است.

یسشتر بخوانید:انتقال قدرت گیربکس
این آرایش گاهی اوقات به عنوان جعبهدنده تعویض مستقیم یا جعبهدنده انتقال قدرت نیز شناخته میشود. این روش به دنبال ترکیب مزایای یک تعویض دستی معمولی با ویژگیهای یک گیربکس خودکار مدرن با فراهم کردن کلاچهای مختلف برای دندههای زوج و فرد انتخابگر سرعت است. هنگام تغییر دنده، گشتاور موتور به صورت پیوسته از یک دنده به دنده دیگر منتقل میشود، بنابراین دنده نرم و صاف بدون از دست دادن توان یا لرزش وسیله نقلیه، تغییر میکند. انتخاب دنده ممکن است دستی، خودکار (بسته به سنسورهای سرعت/دریچه گاز)، یا در نسخه اسپرت با ترکیب هر دو گزینه باشد.
یک گیربکس دوکلاچه، به صورت متناوب، از دو مجموعه درونی، هر کدام با کلاچ خود، استفاده میکند، به طوری که یک "تعویض دنده" در واقع تنها شامل یک درگیر کردن کلاچ است، زیرا دیگری یک تغییر "یکپارچه" فرضی را بدون وقفه در انتقال قدرت (یا از دست دادن بازجذب) ایجاد میکند. هر شفت متصل به کلاچ، نیمی از کل تجهیزات دنده ورودی (با یک شفت خروجی مشترک) را حمل میکند، که شامل سیستمهای کلاچ دندهای هماهنگ که از پیش انتخاب میکنند که کدام یک از مجموعه نسبتهای آن به احتمال زیاد در تعویض دنده بعدی، بر اساس فرمان یک سیستم کنترل کامپیوتری، مورد نیاز است.
انواع خاص این سیستم انتقال قدرت شامل "جعبهدنده تعویض مستقیم" می شود.
گیربکس متغیر پیوسته (CVT) گیربکسی است که در آن نسبت سرعتهای چرخشی دو شفت ورودی و شفت خروجی یک وسیله نقلیه یا ماشین دیگر، میتواند به طور مداوم در یک دامنه مشخص تغییر کند، که همین مطلب سبب ایجاد تعداد نامحدودی از نسبتهای سرعت میشود. CVT به راننده یا کامپیوتر اجازه میدهد تا رابطه بین سرعت موتور و سرعت چرخها را در یک دامنه پیوسته انتخاب کند. این ویژگی میتواند حتی مصرف سوخت بهتری را فراهم کند اگر موتور به طور مداوم با یک سرعت واحد کار کند. گیربکس از نظر تئوری، تجربه کاربری بهتر، بدون افزایش و کاهش سرعت موتور و حرکت ناگهانی که در هنگام تغییر دندهها اندکی احساس میشود، است.
CVTها به طور فزایندهای در خودروهای کوچک و به ویژه خودروهای هیبریدی و یا خودروهای با مصرف بنزین بالا یافت میشوند. در این پلتفرمها، گشتاور محدود است زیرا موتور الکتریکی میتواند گشتاور را بدون تغییر سرعت موتور فراهم کند. در حالتی که موتور در حال چرخش با سرعتی که بهترین مصرف گاز را برای شرایط عملیاتی دادهشده تولید میکند، بماند؛ مصرف کلی میتواند در سیستمی با تعداد چرخدنده ثابت کمتر، که در آن سیستم ممکن است تنها برای محدوده کمی از سرعتها در بازده اوج کار کند، بهبود پیدا کند. CVTها در تجهیزات کشاورزی نیز یافت میشوند. با توجه به ماهیت گشتاور بالای این وسایل، برای تامین نیروی کششی در سرعتهای بالا، چرخدندههای مکانیکی با یکدیگر ترکیب میشوند. این سیستم مشابه جعبهدنده هیدرواستاتیکی است و در سرعتهای پایین به طور کامل به یک محرک هیدرواستاتیکی وابسته است. تولید کننده تراکتور آلمانی، فنت، با توسعه مدل خود پیشگام این تکنولوژی شد.

IVT یک نوع خاص از CVT است که نه تنها شامل تعداد نامحدودی از نسبتهای دنده میشود، بلکه محدوده "نامحدود" را نیز شامل میشود. این یک حالت به خصوص است، در واقع به CVTهایی اشاره دارد که یک "نسبت صفر" نیز دارا هستند، که در این نسبت شفت ورودی میتواند بدون هیچ گونه حرکت شفت خروجی در حالی که در دنده باقی میماند، بچرخد. در این حالت، نسبت دنده "بینهایت" نیست، بلکه "تعریفنشده" است.
اکثر (اگر نه همه) IVTها ناشی از ترکیب یک CVT با یک سیستم دنده اپیسیکلیک با یک نسبت ثابت هستند. ترکیب نسبت ثابت دنده اپیسیکلیک با یک نسبت تطبیق خاص در طرف CVT منجر به خروجی صفر میشود. به عنوان مثال، گیربکسی با یک دنده اپیسیکلیک تنظیم شده با نسبت دنده ۱-:۱ را در نظر بگیرید؛ یک دنده معکوس ۱: ۱. هنگامی که طرف CVT بر روی ۱: ۱ تنظیم میشود، این دو نسبت به خروجی صفر اضافه میشوند. IVT همیشه درگیر است، حتی در حین خروجی صفر. زمانی که CVT روی مقادیر بالاتر تنظیم میشود، به طور مرسوم با افزایش نسبتهای رو به جلو عمل میکند.
در عمل، اگر دنده معکوس مورد نیاز نباشد یا از طریق روشهای دیگر انجام شود، دنده اپیسیکلیک ممکن است بر روی کمترین نسبت ممکن CVT تنظیم شود. معکوس کردن را میتوان با تنظیم نسبت دنده اپیسیکلیک بالاتر از کمترین نسبت CVT ایجاد کرد، که طیف وسیعی از نسبتهای معکوس را فراهم میکند.
گیربکس متغیر الکتریکی (EVT یا e–CVT) گیربکس را با یک موتور الکتریکی ترکیب میکند تا حس یک CVT تنها را ایجاد کند. در پیکربندی رایج، یک موتور بنزینی به یک انتقال سنتی متصل است، که به نوبه خود به یک حامل سیارهای سیستم دنده اپیسیکلیک متصل است. یک موتور/ژنراتور الکتریکی به دنده مرکزی "خورشیدی" متصل است، که معمولا در سیستمهای اپیسیکلیک معمولی غیرمتحرک است. هر دو منبع قدرت را می توان همزمان با تقسیم قدرت بین آنها به خروجی گیربکس متصل کرد. در مثالهای رایج، بین یک چهارم تا نیمی از قدرت موتور را می توان به چرخدنده خورشیدی داد. بسته به پیادهسازی، گیربکس روبروی سیستم اپیسیکلیک ممکن است تا حد زیادی ساده شده و یا به طور کامل حذف شود. EVTها مانند CVTهای مکانیکی قادر به تنظیم پیوسته نسبتهای سرعت ورودی/خروجی هستند، اما مزیت متمایز توانایی اعمال توان از دو منبع مختلف به یک خروجی و همچنین کاهش قابلتوجه پیچیدگی کلی را ارائه میدهند.
در حالتهای معمول، نسبت دنده گیربکس و سیستم اپیسیکلیک با نسبت شرایط معمولی رانندگی به عنوان مثال، سرعت بزرگراه برای یک ماشین، یا سرعت مجاز شهری برای یک اتوبوس، تنظیم میشود. هنگامی که راننده بر روی پدال گاز فشار میآورد، الکترونیک مربوطه موقعیت پدال را تفسیر میکند و بلافاصله موتور بنزین را بر روی دوری که بهترین مصرف گاز را برای آن تنظیم فراهم میکند، تنظیم می کند. از آنجا که نسبت دنده به طور معمول دور از نقطه ماکزیمم گشتاور تنظیم میشود، این تنظیم به طور معمول منجر به شتاب بسیار ضعیف میشود. برخلاف موتورهای بنزینی، موتورهای الکتریکی گشتاور کارآمدی را در کل بازه گسترده دور ارائه میدهند و به ویژه در تنظیمات پایین که در آن موتور بنزینی ناکارآمد است، موثر هستند. با تغییر بار الکتریکی یا منبع روی موتور متصل به دنده خورشیدی، میتوان گشتاور اضافی برای جبران خروجی گشتاور پایین موتور فراهم کرد. همانطور که وسیله نقلیه شتاب میگیرد، توان موتور کاهش مییابد و در نهایت به پایان میرسد و حس یک CVT را ایجاد میکند.
مثال متعارف EVT، هیبرید سینرژی درایو تویوتاست. این مدل هیچ انتقال معمولی ندارد، و دنده خورشیدی همیشه ۲۸ % گشتاور موتور را دریافت میکند. از این توان میتوان برای راهاندازی هر گونه بار الکتریکی در وسیله نقلیه، شارژ مجدد باتریها، تغذیه سیستم سرگرمی، یا روشن کردن سیستم تهویه مطبوع استفاده کرد. سپس هر توان باقی مانده به موتور دومی که خروجی ماشین را به طور مستقیم تغذیه میکند، بازگردانده میشود. در سرعتهای بزرگراهی، این مسیر اضافی ژنراتور/موتور کارایی کمتری نسبت به تغذیه مستقیم چرخها دارد. با این حال، در طول شتاب، مسیر الکتریکی بسیار کارآمدتر از یک موتور است که دور از نقطه گشتاور کار میکند. GM از یک سیستم مشابه در موتور هیبرید اتوبوس آلیسون و کامیونهای پیک آپ تاهو و یوکان استفاده میکند، اما از یک گیربکس دو طرفه در جلوی سیستم اپیسیکلیک استفاده میکنند، و دنده خورشیدی نزدیک به نیمی از توان کل را دریافت میکند.
گیربکسهای الکتریکی، با ژنراتورهای الکتریکی توان مکانیکی موتور(ها) را به الکتریسیته تبدیل میکنند و با موتورهای الکتریکی آن را مجددا به توان مکانیکی تبدیل میکنند. سیستمهای کنترل درایو با سرعت قابل تنظیم الکترونیکی یا الکتریکی برای کنترل سرعت و گشتاور موتورها استفاده میشوند. اگر ژنراتورها توسط توربینها هدایت شوند، چنین سیستمی گیربکس توربو-الکتریک نامیده میشوند. به همین ترتیب، تاسیساتی که با موتورهای دیزلی کار میکنند، دیزل-الکتریک نامیده میشوند.
چیدمانهای الکتریکی دیزلی بر روی بسیاری از لوکوموتیوها، کشتیها، کامیونهای استخراج معادن بزرگ و برخی بولدوزرها استفاده میشود. در این موارد، هر چرخ محرک به موتور الکتریکی خود مجهز است، که میتواند با توان الکتریکی مختلف برای فراهم کردن هر گشتاور یا توان خروجی مورد نیاز برای هر چرخ را به طور مستقل، تغذیه شود. این امر راهحل بسیار سادهتری برای حالت چند چرخ محرک در وسایل نقلیه بسیار بزرگ ایجاد میکند، که در آن شفتهای محرک بسیار بزرگتر یا سنگینتر از کابل الکتریکی هستند که میتوانند همان مقدار توان را فراهم کنند. این موضوع همچنین امکان چرخش چرخهای مختلف در سرعتهای مختلف را بهبود میبخشد که برای چرخهای راهنما در وسایل نقلیه ساختمانی بزرگ مفید است.
گیربکسهای هیدرواستاتیک تمام توان را به صورت هیدرولیک با استفاده از اجزای ماشینآلات هیدرولیکی انتقال میدهند. آنها شبیه به گیربکسهای الکتریکی هستند اما از سیال هیدرولیکی به جای الکتریسیته به عنوان سیستم توزیع قدرت استفاده میکنند.
محرک ورودی گیربکس یک پمپ هیدرولیکی مرکزی است و واحد محرک نهایی یک موتور هیدرولیکی یا سیلندر هیدرولیکی است. هر دو جزء را می توان به صورت فیزیکی دور از هم، طوری که تنها توسط شیلنگهای انعطافپذیر به هم متصل باشند، بر روی دستگاه قرار داد. سیستمهای محرک هیدرواستاتیک بر روی ماشینهای حفاری، تراکتورهای چمنزن، لیفتراک، سیستمهای وینچ درایو، تجهیزات بالابر سنگین، ماشینآلات کشاورزی، تجهیزات حرکت زمین و غیره به کار میروند. یک نوع چیدمان برای گیربکس وسیله نقلیه موتوری در سال ۱۹۶۱ بر روی ماشین مسابقه فرگوسن F-1 P99 مورد استفاده قرار گرفت.
گیربکس کاربرپسند هوندا DN-01 هیدرواستاتیک است.
اگر پمپ هیدرولیک یا موتور هیدرولیکی از اثرات هیدرودینامیکی جریان سیال، برای مثال فشار ناشی از تغییر اندازه حرکت سیال جاری در پرههای یک توربین، استفاده کند. پمپ و موتور معمولا شامل پرههای چرخان بدون آببند هستند و معمولا در مجاورت هم قرار میگیرند. نسبت انتقال میتواند با اضافه کردن پرههای چرخشی اضافی تغییر کند، اثری مشابه با تغییر گام پروانه هواپیما.
مبدل گشتاور در اکثر گیربکسهای خودکار خودرو، به خودی خود، یک گیربکس هیدرودینامیکی است. گیربکسهای هیدرودینامیکی در بسیاری از وسایل نقلیه ریلی مسافربری که از گیربکسهای الکتریکی استفاده نمیکنند، مورد استفاده قرار میگیرند. در این کاربرد، مزیت تحویل روان توان ممکن است بیشتر از بازده کاهشیافته ناشی از تلفات انرژی آشفتگی در سیال باشد.
یک مجموعه چرخدنده اپیسیکلیک (که به آن چرخدنده سیارهای نیز گفته میشود) از دو چرخدنده نصبشده تشکیل شدهاست به طوری که مرکز یک چرخدنده حول مرکز چرخدنده دیگر میچرخد. یک حامل مراکز این دو دنده را به هم متصل میکند و برای حمل یک دنده به نام دنده سیارهای یا پینیون سیارهای به دور دیگری به نام دنده خورشیدی یا چرخ خورشیدی میچرخد. سیاره و خورشیدی به صورت شبکهای در میآیند به طوری که دایرههای پیج آنها بدون لغزش میچرخند. نقطهای در دایره اوج دنده سیارهای، یک منحنی اپیکلوئید را دنبال میکند. در این حالت ساده شده، دنده خورشیدی ثابت است و دنده(های) سیارهای به دور دنده خورشیدی میچرخند.
یک مجموعه چرخدنده اپیسیکلیک میتواند طوری مونتاژ شود که چرخدنده سیارهای در داخل دایره گام چرخدنده حلقهای ثابت خارجی، یا چرخدنده حلقهای که گاهی اوقات یک چرخدنده حلقوی نامیده میشود، بچرخد. در این مورد، منحنی ردیابی شده توسط یک نقطه در دایره گام سیاره یک هیپوسیکلوئید است.
ترکیبی از چرخدندههای اپیسیکلیک با یک سیاره که هم با یک چرخدنده خورشیدی و هم با یک چرخدنده حلقهای درگیر است، یک مجموعه چرخدنده سیارهای نامیده میشود. در این حالت، چرخدنده حلقهای معمولا ثابت است و چرخدنده خورشیدی رانده میشود.
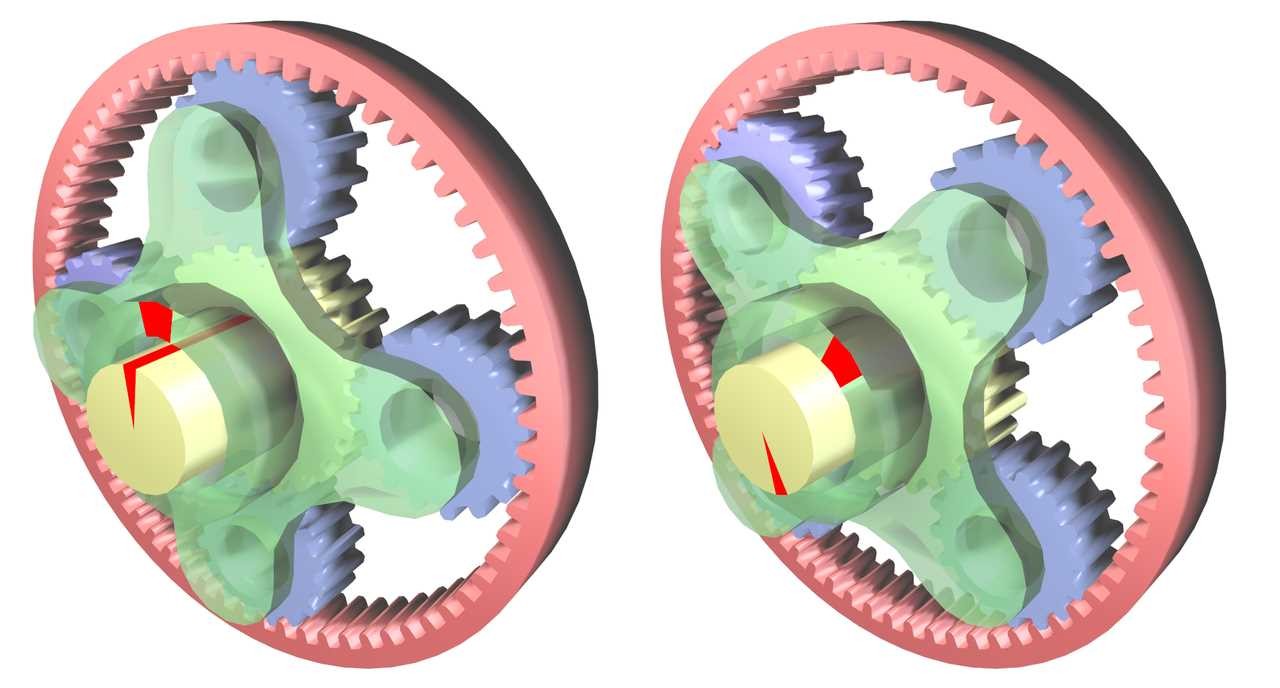
این چرخدنده سیارهای از یک چرخدنده خورشیدی (زرد)، چرخدنده سیاره (آبی) با یک پشتیبان حامل (سبز) و یک چرخدنده حلقهای (صورتی) تشکیل شدهاست. علامتهای قرمز جابجایی نسبی دنده خورشید و حامل را، زمانی که حامل ۴۵ درجه در جهت عقربههای ساعت میچرخد و دنده حلقهای ثابت نگهداشته میشود، نشان میدهند.
چرخدنده اپیسیکلیک یا چرخدنده سیارهای یک سیستم چرخدنده است که شامل یک یا چند چرخدنده خارجی، یا سیارهای یا پینیون است که حول چرخدنده خورشیدی مرکزی یا چرخ خورشیدی میچرخند. به طور معمول، چرخدندههای سیارهای بر روی یک بازوی متحرک یا حامل نصب میشوند، که خود ممکن است نسبت به چرخدنده خورشیدی دوران کند. سیستمهای چرخدنده اپیسیکلیک شامل یک چرخدنده حلقهای خارجی یا حلقه حلقوی است که با چرخدندههای سیارهای مش شده است، چرخدندههای سیارهای (یا چرخدندههای اپیسیکلیک) معمولا به عنوان چرخدندههای ساده یا ترکیبی سیارهای طبقهبندی میشوند. چرخدندههای ساده سیارهای یک خورشیدی، یک حلقه، یک حامل و یک سیاره دارند. چرخدندههای سیارهای مرکب شامل یک یا چند نوع ساختار زیر هستند: شبکه-سیاره (حداقل دو سیاره دیگر در شبکه با یکدیگر در هر مجموعه سیارهای وجود دارد)، سیاره پلهای (یک اتصال شفت بین دو سیاره در هر مجموعه سیارهای وجود دارد)، و ساختارهای چند مرحلهای (سیستم شامل دو یا چند مجموعه سیارهای است). در مقایسه با چرخدندههای ساده سیارهای، چرخدندههای مرکب سیارهای دارای مزیت نسبت کاهش بیشتر، نسبت گشتاور به وزن بالاتر و پیکربندیهای انعطافپذیرتر هستند.
محورهای همه چرخدندهها معمولا موازی هستند، اما برای موارد خاص مانند مداد تراش و دیفرانسیلها، می توان با معرفی عناصر چرخدنده مخروطی، آنها را در یک زاویه قرار داد (پایین را ببینید). علاوه بر این، خورشیدی، حامل سیاره و محورهای حلقه معمولا هممحور هستند.
چرخدندههای اپیسیکلیکی نیز وجود دارند که شامل خورشید، حامل و دو سیاره است که با یکدیگر شبکه شدهاند. یک سیاره با چرخدنده خورشید گره میخورد، در حالی که سیاره دوم با لوازم حلقه گره میخورد. برای این مورد، وقتی حامل ثابت است، دنده حلقه در همان جهت دنده خورشید میچرخد و یک برگشت جهت در مقایسه با دنده اپیسیکلیک استاندارد فراهم میکند.

در حدود سال ۵۰۰ پیش از میلاد، یونانیها ایده اپیسیکلها، دایرههایی که در مدار دایره حرکت میکردند را اختراع کردند. با این نظریه، کلاودیوس بطلمیوس در آلماگست در سال ۱۴۸ میلادی توانست مسیرهای مداری سیارهای را پیشبینی کند. مکانیسم آنتی کیترا، در حدود سال ۸۰ پیش از میلاد، دارای توری بود که میتوانست مسیر بیضوی ماه را از طریق آسمانها تقریب بزند و حتی دقت مسیر نه ساله را اصلاح کند. مکانیسم آنتی کیترا، در حدود سال ۸۰ پیش از میلاد، دارای چرخدندهای بود که میتوانست مسیر بیضوی ماه را از آسمانها تقریب بزند و حتی پیشروی نه ساله آن مسیر را اصلاح کند (یونانیان آن را نه به صورت بیضوی، بلکه به عنوان حرکت اپیسیکلیک میدیدند).
در رساله آلماگست قرن دوم میلادی، بطلمیوس از چرخش محورهای مختلف و اپیسیکلهایی که چرخدندههای اپیسیکلیک را تشکیل میدهند برای پیشبینی حرکات سیارات استفاده کرد. پیشبینی دقیق حرکت خورشید، ماه و پنج سیاره عطارد، ونوس، مریخ، مشتری و زحل در آسمان، فرض را بر این گذاشت که هر یک از آنها یک خط سیر را با یک نقطه بر روی دنده سیارکی دنبال میکنند. این منحنی را اپیتروکوئید مینامند. چرخهای اپیسیکلیک در مکانیزم آنتیکیترا، حدود ۸۰ سال پیش از میلاد، برای تنظیم موقعیت نمایشدادهشده ماه به دلیل بیضوی بودن مدار آن و حتی برای انحراف اپیسیدالی مدار آن مورد استفاده قرار گرفت. دو دنده رو به روی هم در اطراف مراکز کمی متفاوتی، چرخانده شدند، و یکی از آنها دیگری را نه با دندانهی درگیر بلکه با پینی که در شیاری در دومی قرار داشت میراند.
همانطور که شکاف دنده دوم را میراند، شعاع چرخش نیز تغییر میکند، در نتیجه نیاز به یک افزایشدهنده سرعت پیدا میکند و سرعت دنده متحرک در هر دور کم میشود.
در قرن یازدهم بعد از میلاد، چرخدندههای اپیسیکلیک توسط ابن خلف المرادی در آلاندلوس دوباره اختراع شد. ساعت آبی چرخدندهای او یک مکانیزم چرخدندهای پیچیده را به کار گرفت که شامل چرخدندههای قطعهای و اپیسیکلیک بود.
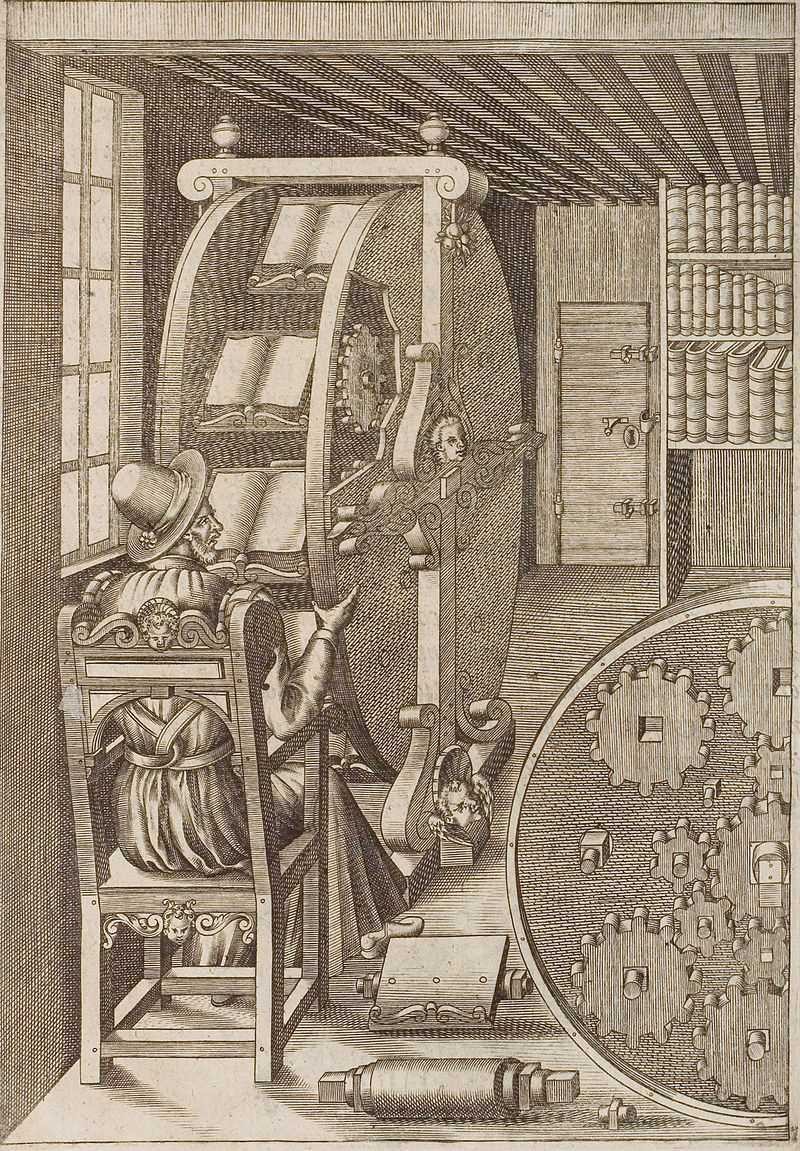
ریچارد از والینگفورد، یک کشیش انگلیسی از صومعه سنت آلبنز، بعدها چرخدندههای اپیسیکلیک یک ساعت نجومی در قرن ۱۴ را توصیف کرد. در سال ۱۵۸۸، مهندس نظامی ایتالیایی آگوستینو راملی، چرخ کتاب را اختراع کرد، یک قفسه کتاب که به صورت عمودی در حال چرخش بود و شامل چرخدندههای اپیسیکلیک با دو سطح چرخدنده سیارهای بود تا جهتگیری مناسب کتابها حفظ شود.
بیشتر بخوانید:گیربکس دستی
نسبت دنده یک سیستم چرخدنده اپیسیکلیک تا حدودی غیر شهودی است، به ویژه به این دلیل که چندین راه وجود دارد که در آن یک چرخش ورودی میتواند به یک چرخش خروجی تبدیل شود. سه مولفه اصلی دنده اپیسیکلیک عبارتند از:
نسبت کلی دنده یک مجموعه چرخدنده سیارهای ساده را می توان با استفاده از دو معادله زیر محاسبه کرد که به ترتیب نشاندهنده فعل و انفعالات خورشید-سیاره و سیاره-حلقه هستند:
![]()
که در آن
ωr ،ωs، ωp، ωc سرعت زاویهای حلقه، چرخدنده خورشیدی، چرخدندههای سیارهای و سیاره حامل است، و
Nr، Ns، Np به ترتیب تعداد دندانههای حلقه، چرخدنده خورشیدی و هر چرخدنده سیارهای است.
که از آن میتوانیم نتیجه بگیریم:

![]()

و
با در نظر گرفتن ωr≠ωc
از طرف دیگر، اگر تعداد دندانههای روی هر چرخدنده با رابطه Nr=Ns+2Np مطابقت داشته باشد، این معادله میتواند به صورت زیر بازنویسی شود:
![]()
که در آن 
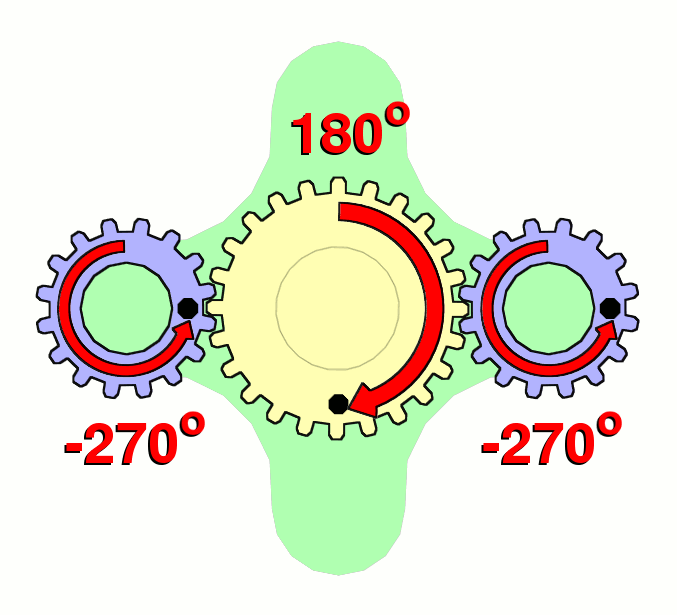
در این مثال، حامل (سبز) ثابت نگهداشته میشود در حالی که دنده خورشیدی (زرد) به عنوان ورودی استفاده میشود. در تحلیل فرض بر این است که یک مدول طراحی دنده مشترک وجود دارد. چرخدندههای سیارهای (آبی) به نسبت تعیینشده توسط تعداد دندانههای هر چرخدنده میچرخند. در اینجا، نسبت ۱۶/۲۴-، یا ۲/۳- است؛ هر چرخدنده سیاره ای با ۲/۳ سرعت دنده خورشیدی، در جهت مخالف میچرخد.
این روابط را می توان برای تجزیه و تحلیل هر سیستم اپیسیکلیک، شامل مواردی مانند گیربکس وسیله نقلیه هیبریدی استفاده کرد، که در آن دو جزء به عنوان ورودی داده میشوند و سومین جزء خروجی را نسبت به آن دو ورودی به دست می آورد.
در بسیاری از سیستمهای چرخدندهای اپیسیکلیک، یکی از این سه مولفه اساسی ثابت نگهداشته میشود؛ یکی از دو جز باقیمانده یک ورودی است که توان را به سیستم میدهد، در حالی که جز آخر یک خروجی است که توان را از سیستم دریافت میکند. نسبت چرخش ورودی به چرخش خروجی به تعداد دندانههای هر چرخدنده و اینکه بر روی کدام جزء ثابت نگهداشته میشود، بستگی دارد.
در یک ترکیب بندی، حامل سیارهای (سبز) ثابت نگهداشته میشود و از چرخدنده خورشیدی (زرد) به عنوان ورودی استفاده میشود. در این حالت، چرخدندههای سیارهای به سادگی حول محورهای خود با سرعتی که با تعداد دندانههای هر چرخدنده تعیین میشود، میچرخند (میگردند). اگر چرخدنده خورشیدی دارای Ns دندانه باشد، و هر چرخدنده سیارهای دارای Np دندانه باشد، آنگاه نسبت برابر خواهد بود با −Ns/Np. به عنوان مثال، اگر چرخدنده خورشیدی ۲۴ دندانه داشته باشد، و هر چرخدنده سیارهای ۱۶ دندانه داشته باشد، نسبت آنها ۱۶/۲۴- یا ۲/۳- است؛ این بدان معنی است که یک چرخش ساعتگرد چرخدنده خورشیدی برابر با ۱.۵ دور در خلاف جهت عقربههای ساعت چرخدنده سیارهای حول محورش است.
این چرخش چرخدندههای سیارهای میتواند به نوبه خود چرخدنده حلقهای (که در نمودار نشان داده نشده است) را با یک نسبت متناظر بچرخاند. اگر چرخدنده حلقه ای دارای Nr دندانه باشد، حلقه Np/Nr دور به نسبت هر دور چرخدندههای سیاره ای میچرخد. به عنوان مثال، اگر چرخدنده حلقهای دارای ۶۴ دندانه باشد و سیاره ۱۶ دندانه داشته باشد، با یک چرخش ساعتگرد چرخدنده سیارهای، چرخدنده حلقهای ۶۴/۱۶ یا ۴/۱ دور ساعتگرد می چرخد. با بسط دادن حالت بالا داریم:
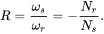
بنابراین، با قفل شدن حامل سیاره، یک دور چرخش چرخدنده خورشیدی منجر به -Ns/Nr دور چرخدنده حلقهای میشود. همچنین ممکن است چرخدنده حلقهای ثابت نگهداشته شود و ورودی آن به حامل چرخدنده سیارهای داده شود؛ سپس چرخش خروجی از چرخدنده خورشیدی ایجاد میشود. این پیکربندی منجر به افزایش نسبت دنده برابر با 1+Nr/Ns میشود.
اگر چرخدنده حلقهای ثابت نگهداشته شود و چرخدنده خورشیدی به عنوان ورودی استفاده شود، حامل سیاره، خروجی خواهد بود. نسبت دنده در این مورد (1+Nr/Ns)/۱ خواهد بود که همچنین میتواند به صورت 1+Nr/Ns:1 نوشته شود. این پایینترین نسبت دنده قابلدسترسی در یک مجموعه چرخدنده اپیسیکلیک است. این نوع دنده گاهی اوقات در تراکتورها و تجهیزات ساختوساز برای تامین گشتاور بالای چرخهای محرک استفاده میشود.
در چرخدندههای مرکزی دوچرخه، خورشید معمولا ثابت است، با خار به محور متصل است یا حتی به طور مستقیم بر روی محور ماشین میشود. در این حالت نسبت دنده به سادگی (Ns+Nr)/Nr میشود. که تعداد دندانههای چرخدنده سیاره بیتاثیر است.

سیارههای مرکب یک هاب دوچرخه استارمی-آرچر ای ام (دنده حلقهای برداشته شده)
از فرمولهای بالا میتوان شتاب خورشید، حلقه و حامل را بدست آورد:

در چرخدندههای اپیسیکلیک، دو سرعت باید وجود داشته باشند تا سرعت سوم تعیین شود. با این حال، در شرایط پایدار، تنها یک گشتاور باید مشخص باشد، تا دو گشتاور دیگر تعیین شود. معادلاتی که گشتاور را تعیین میکنند عبارتند از:


![]()
که در آن: τr گشتاور حلقه (آنولوس)، τs گشتاور خورشید، τc گشتاور حامل است. برای هر سه، اینها گشتاورهای اعمالشده به مکانیزم هستند (گشتاورهای ورودی). گشتاورهای خروجی علامت معکوس گشتاورهای ورودی را دارند.
در مواردی که چرخدندهها شتاب میگیرند، یا برای در نظر گرفتن اصطکاک، این معادلات باید اصلاح شوند.
یک روش مناسب برای تعیین نسبتهای سرعت مختلف موجود در یک مجموعه سیارهای با در نظر گرفتن نسبت سرعت مجموعه چرخدنده در زمانی که حامل ثابت نگهداشته میشود، آغاز میشود. این به عنوان نسبت چرخ حامل ثابت شناخته میشود.
در مورد یک چرخ ساده سیارهای که توسط یک حامل که از یک چرخدنده سیارهای که با یک خورشید و چرخدنده حلقهای درگیر است، تشکیل شدهاست، نسبت چرخ حامل ثابت هنگامی که نسبت سرعت چرخ چرخدنده توسط خورشید، سیاره و چرخدنده حلقهای بر روی حامل ثابت ایجاد شود، محاسبه شدهاست. این نسبت توسط معادله زیر به دست می اید:
در این محاسبه، دنده سیاره یک دنده هرزگرد است.
فرمول اساسی چرخدنده سیارهای با یک حامل چرخان با در نظر داشتن این که این فرمول در صورت محاسبه سرعت زاویهای چرخدندههای خورشیدی، سیارهای و حلقهای نسبت به سرعت زاویهای حامل صحیح است، به دست میآید. بنابرین،
![]()
این فرمول یک راه ساده برای تعیین نسبتهای سرعت برای چرخ سیارهای ساده تحت شرایط مختلف فراهم میکند:
۱. حامل ثابت نگهداشته میشود، ωc=0

۲. چرخدنده حلقهای ثابت نگهداشته میشود، ωr=0

۳. خورشید ثابت نگه داشته می شود، ωs=0

هر یک از نسبتهای سرعت در دسترس برای یک قطار ساده سیارهای را می توان با استفاده از نوارهای ترمز برای نگه داشتن و آزاد کردن حامل، خورشید یا چرخدندههای حلقهای در صورت نیاز به دست آورد. این ساختار اصلی یک گیربکس اتوماتیک را شکل میدهد.
دیفرانسیل دنده ساده با درگیر کردن چرخدندههای سیاره ای دو چرخدنده اپیسیکلیک هم محور ساخته شده است. یک محفظه، حامل این مجموعه چرخدنده سیارهای است.
دیفرانسیل دنده ساده از دو چرخدنده هممحور یکسان که در یک حامل مونتاژ شدهاند، ساخته شدهاست به طوری که چرخدندههای سیاره ای آنها درگیر هستند. این امر یک چرخ سیارهای با نسبت چرخ حامل ثابت R=-1 را ایجاد میکند.
در این حالت، فرمول اساسی برای دنباله چرخدنده سیارهای به این صورت به دست می آید،

یا
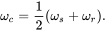
بنابراین، سرعت زاویهای حامل یک دیفرانسیل چرخدنده ساده، میانگین سرعتهای زاویهای چرخدندههای خورشیدی و حلقهای است.
در بحث دیفرانسیل چرخدنده ساده، استفاده از عبارت چرخدنده حلقه ای یک راه مناسب برای تشخیص چرخدندههای خورشید دو دنباله چرخدنده اپیسیکلیک است. چرخدنده خورشید دوم همان هدف چرخدنده حلقهای یک دنباله ساده سیارهای را دارد، اما به وضوح چرخ همراه داخلی آن را ندارد که از ویژگی های یک چرخدنده حلقهای است.
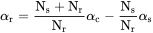
برخی از چرخدندههای اپیسیکلیک از دو چرخدنده سیارهای استفاده میکنند که با یکدیگر درگیر می شوند. یکی از این سیارات با دنده خورشیدی درگیر میشود، و سیاره دیگر با دنده حلقهای درگیر است. این امر منجر به ایجاد نسبتهای مختلف توسط سیاره میشوند. معادله بنیادی به صورت زیر است:
![]()
که در آن R=Nr/Ns
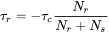
که در نتیجه :
 هنگامی که حامل قفل است،
هنگامی که حامل قفل است،
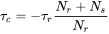
![]() هنگامی که خورشید قفل است،
هنگامی که خورشید قفل است،
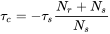
![]() هنگامی که دنده حلقه قفل است.
هنگامی که دنده حلقه قفل است.


















































ااطلاعات شرکت
 آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
آدرس :
تهران، خ امیرکبیر، خ ملت، کوچه کاوه، پلاک 43، واحد 2
 روابط عمومی
021-33532382
روابط عمومی
021-33532382
 پست الکترونیک:
info@partestan.com
پست الکترونیک:
info@partestan.com
 فکس:
021-36619921
فکس:
021-36619921
لینک های کاربردی
پارتستان من
تمامی حقوق وب سایت متعلق به گروه پارتستان می باشد.
© 2018 PARTESTAN . ALL RIGHTS RESERVED








